


Kit de motor paso a paso de circuito cerrado nema 34 12.5N.m
$ 229.900 IVA incluido
Kit de motor paso a paso de circuito cerrado nema 34 12.5N.m 86HB250-156B y DRIVER OK2D86BH
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Solo quedan 1 disponibles
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
Este kit de motor paso a paso NEMA 34, modelo 86HB250-156B, es ideal para quienes buscan una solución potente y precisa en el control de movimiento! Con un par de retención de 12.5 N.m, ofrece un rendimiento robusto. Su diseño NEMA 34 facilita la integración en diversos sistemas, y el circuito cerrado mejora la precisión del control de posición. Perfecto para aplicaciones en automatización industrial, maquinaria CNC y otros entornos donde se necesita un movimiento fiable y eficiente.(incluye
Características:
- Par de Retención: 12.5 N.m
- Velocidad máxima: 2000RPM
- Velocidad nominal: 1000RPM
- Diseño: NEMA 34 para fácil integración.
- Control de Movimiento: Circuito cerrado para mayor precisión.
- Corriente Nominal: 6 [A].
- Resistencia de fase: 0.65 [omh].
- Inductancia de fase: 58 [mH].
- Número de Fases: Motor de dos fases para control preciso.
- Tamaño del Eje: 14 [mm] diámetro y 34 [mm] de largo
- Material: Alta calidad para una vida útil prolongada.
- Temperatura de Operación: 0- 50 °C
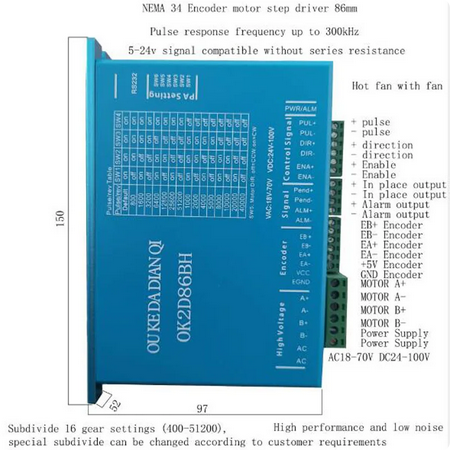
- Conexiones: Puerto serie RS322 y conexión de fase del panel de depuración.
- Peso y Dimensiones: El motor Nema 34 pesa 5,3[Kg] y el Driver 0.6[Kg].
Motor NEMA 84HB250-156B



Driver OK2D86BH


Preguntas Frecuentes
¿Cuál es la ventaja real de un sistema de «circuito cerrado» (closed-loop) frente a uno estándar (open-loop)?
La diferencia es fundamental y es la principal razón para elegir este kit. En un sistema estándar de lazo abierto, el controlador «espera» que el motor se mueva a la posición indicada, pero no tiene forma de saber si realmente lo hizo. Si el motor encuentra demasiada resistencia, puede perder pasos, arruinando el trabajo.
Este sistema de circuito cerrado incorpora un encoder rotativo en la parte trasera del motor. Este encoder informa constantemente al driver de la posición real del eje. Esto proporciona ventajas cruciales:
- Sin pérdida de pasos: Si el motor se desvía, el driver lo corrige en tiempo real, garantizando una precisión absoluta.
- Mayor velocidad y torque: El sistema puede operar más cerca de los límites del motor sin miedo a perder pasos.
- Mayor eficiencia y menor calor: El driver solo entrega la corriente necesaria para mantener la posición, a diferencia de los sistemas de lazo abierto que siempre operan a máxima corriente.
- Funcionamiento más silencioso.
¿Qué fuente de alimentación necesito para este kit? No viene incluida.
Este es un punto crítico. Necesitarás una fuente de poder DC de alto voltaje y alta corriente, que no está incluida. El driver OK2D86BH opera en un rango de voltaje de 24V a 80V DC.
Para obtener el máximo rendimiento de torque a altas velocidades, se recomienda usar un voltaje elevado. Una fuente de alimentación de 48V DC o 60V DC es una elección excelente y muy común para motores NEMA 34. La fuente debe ser capaz de suministrar como mínimo la corriente nominal del motor, es decir, al menos 6 Amperios (A). Usar una fuente de bajo voltaje (ej. 12V) limitará severamente la velocidad y el torque del motor.
¿Cómo controlo este driver? ¿Puedo usar un Arduino?
Sí, la lógica de control es la misma que la de drivers más pequeños. El driver se controla mediante señales estándar de PULSO (PUL) y DIRECCIÓN (DIR).
- Con Arduino: Puedes usar un Arduino con un firmware como GRBL para generar las señales de PULSO y DIRECCIÓN. Es una opción viable para máquinas CNC de hobby.
- Con Controladores Dedicados: Para aprovechar al máximo la velocidad y potencia de este kit en una máquina CNC profesional, se recomienda usar un software y hardware de control más robusto, como una placa de interfaz para Mach3 o LinuxCNC, que están diseñados para generar trenes de pulsos de alta frecuencia de forma muy estable.
El torque de 12.5 N.m es muy alto. ¿Qué significa eso en términos prácticos?
Un torque de 12.5 Newton-metro es una fuerza de rotación extremadamente alta, adecuada para aplicaciones industriales. Para visualizarlo: si conectaras una palanca de un metro de largo al eje de este motor, sería capaz de levantar un peso de aproximadamente 1.27 kilogramos desde el extremo de esa palanca. Esta inmensa fuerza es lo que le permite mover pórticos pesados (gantries) en máquinas CNC, resistir las fuerzas de corte de un fresado en metal, o manejar cargas pesadas en sistemas de automatización sin perder precisión.
¿Cómo configuro el driver OK2D86BH? Veo que tiene interruptores.
El driver se configura mediante una serie de interruptores DIP en su carcasa. Estos te permiten ajustar dos parámetros clave:
- Corriente de Salida: Debes configurar los interruptores para que la corriente de salida coincida con la corriente nominal del motor, que en este caso es de 6A. Esto asegura un rendimiento óptimo.
- Microstepping (Micropasos): Te permite dividir cada paso completo del motor (típicamente de 1.8°) en pasos mucho más pequeños (ej. 1/8, 1/16, 1/32 de paso). Usar un valor de microstepping alto resulta en un movimiento mucho más suave, silencioso y con mayor resolución, lo cual es vital para un buen acabado en trabajos de CNC.
Deberás consultar la tabla impresa en el propio driver para ver la combinación correcta de interruptores para cada ajuste.
El motor tiene dos conectores. ¿Cómo se conectan al driver?
El motor tiene dos grupos de cables que salen de él, cada uno con su propio conector:
- Cable de Potencia (más grueso): Este tiene 4 cables para las dos fases del motor (A+, A-, B+, B-). Se conecta a los terminales de tornillo correspondientes en el driver.
- Cable del Encoder (más fino): Este es el cable de la retroalimentación del sistema de lazo cerrado. Se conecta al puerto dedicado del encoder en el driver.
Es fundamental no mezclar estas conexiones. El kit está diseñado para que estos componentes sean directamente compatibles entre sí.
Valoraciones (0)
Sé el primero en valorar “Kit de motor paso a paso de circuito cerrado nema 34 12.5N.m”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados





Valoraciones
No hay valoraciones aún.