Precisión centimétrica para tu auto RC, sin gastar una fortuna
¿Te imaginas que tu auto RC supiera dónde está en la pista con un error de apenas un par de centímetros? Eso es lo que logra el GPS RTK (Real Time Kinematic), la tecnología detrás de proyectos como DonkeyCar que corren solos siguiendo una ruta grabada. El problema histórico siempre fue el mismo: armar la estación base (el equipo fijo que envía correcciones al auto) salía carísimo.
En este tutorial vas a aprender a montar una estación base RTK GPS funcional por menos de USD 400, frente a los más de USD 600 de una versión tradicional. La idea, desarrollada por Tom Coyle en DIY Robocars, es simple: una versión "pelada" que integra el módulo RTK y el procesador en una sola placa, elimina la pantalla LCD y conserva solo lo esencial para que tu rover reciba correcciones de posición en tiempo real. Al terminar vas a saber qué hardware comprar, cómo configurar el modo Survey y cómo verificar que las correcciones RTCM realmente lleguen al auto.
Cómo funciona una estación base RTK (la teoría rápida)
El GPS común de un celular tiene un error de varios metros. El RTK lo reduce a centímetros usando dos receptores trabajando juntos: una estación base fija en una posición conocida y un rover móvil (tu auto). La base calcula con mucha precisión cuánto se desvía la señal de los satélites en ese instante, arma un mensaje de corrección llamado RTCM y se lo envía al rover por radio. El rover aplica esas correcciones y obtiene su posición real con error centimétrico.
Por eso una base bien armada importa tanto: si las correcciones RTCM no salen, el auto vuelve a tener la precisión pobre de un GPS normal y se sale de la pista. La gracia de esta versión barata es que mantiene la calidad de las correcciones recortando todo lo accesorio.
Qué hardware necesitas
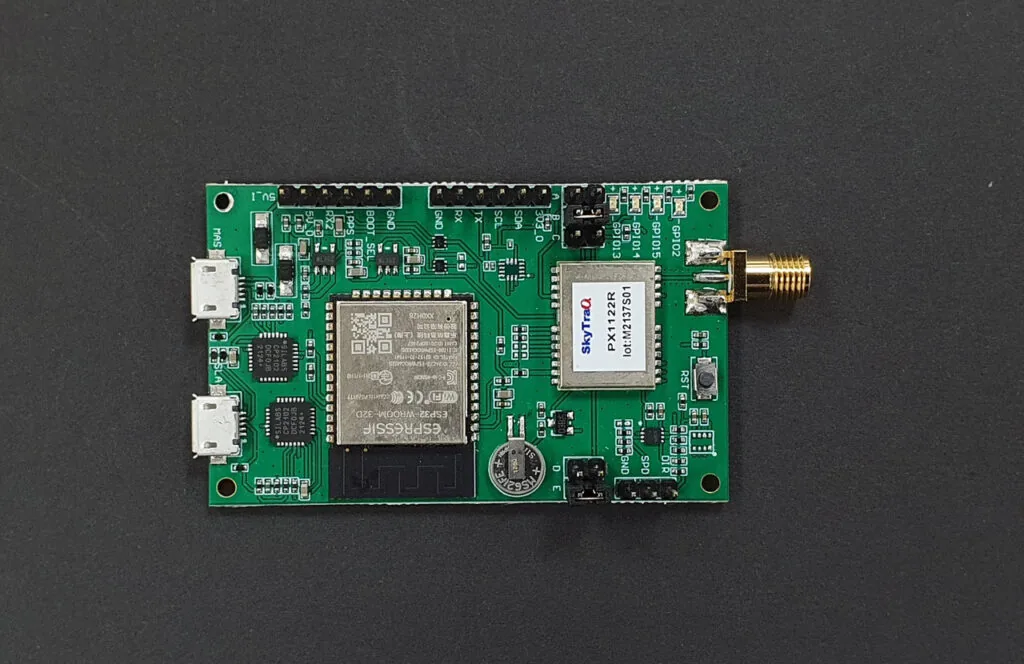
A diferencia de la base original (que usaba un módulo RTK y un procesador separados más una pantalla), esta versión integra el módulo RTK GPS con el procesador ESP32 WROOM en una sola placa y descarta el LCD. Estos son los componentes:
- Placa de evaluación PX1122R L1/L2 RTK (NavSpark Store, Taiwán). Trae el módulo RTK SkyTraQ PX1122R junto al ESP32 WROOM 32D en la misma PCB. Cuesta cerca de USD 95, mucho menos que un SparkFun ZED-F9P. Ojo con el envío: viene por FedEx aéreo desde Taiwán y puede sumar entre USD 50 y USD 60 según dónde vivas.
- Antena Survey Grade L1/L2 para recepción de doble banda. La SparkFun L1/L2/L5 (alrededor de USD 130) deja tu base lista para la banda L5 que entra en operación hacia 2027. Como alternativa más barata existe la Beitian BT-160 (cerca de USD 78), que en pruebas rindió parecido a la SparkFun por unos USD 50 menos.
- Radio de telemetría SiK para transmitir los mensajes RTCM al rover. Es la misma familia de radios que se usa en drones para enviar telemetría MAVLink.
- Carcasa o caja para proteger la placa de evaluación a la intemperie.
- Fuente de 5 V para alimentar la placa por su puerto USB1. En la versión terminada se usó un power bank.
Paso 1: configurar la placa PX1122R como estación base
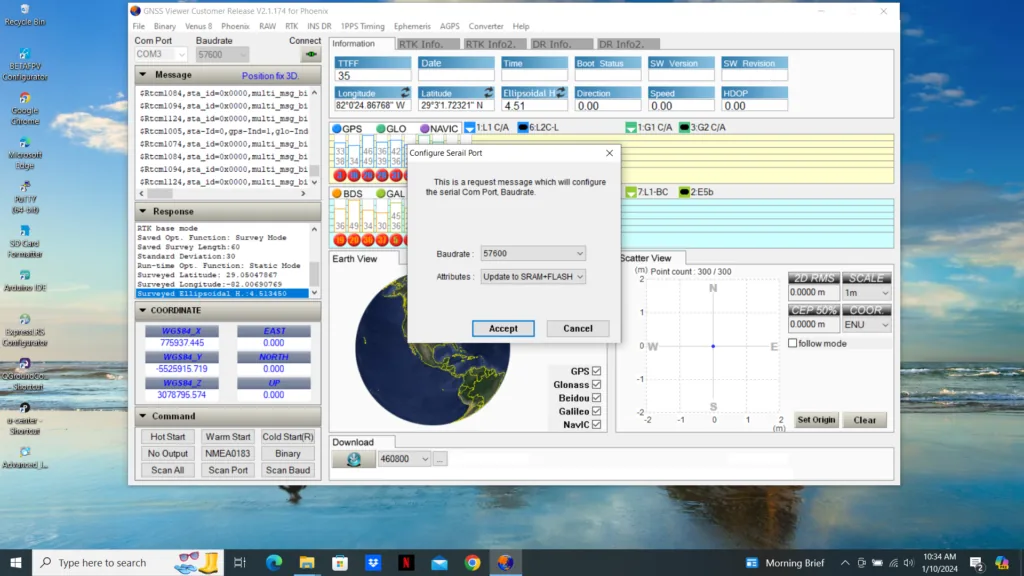
La programación de la placa se hace con el software GNSS Viewer para Windows, siguiendo la guía oficial Getting Started with PX1122R RTK Evaluation Board de NavSpark. Instala el GNSS Viewer (página 3 del documento) y configura la placa en modo estación base usando el Survey Mode (página 10).
El Survey Mode hace que la base promedie su posición durante un tiempo para fijarse en un punto exacto. Tienes dos juegos de parámetros:
- Recomendado (más preciso): tiempo de Survey de 600 segundos y desviación estándar de 30 cm. Es el valor que mejor resultado dio según la experiencia con el ZED-F9P.
- Valores por defecto (más rápido): tiempo de Survey de 60 segundos y desviación estándar de 30 cm. Muchos usuarios los dejan así.
Si recién estás probando, parte con los 60 segundos para no esperar tanto; cuando ya tengas todo funcionando, sube a 600 segundos para una posición base más estable.
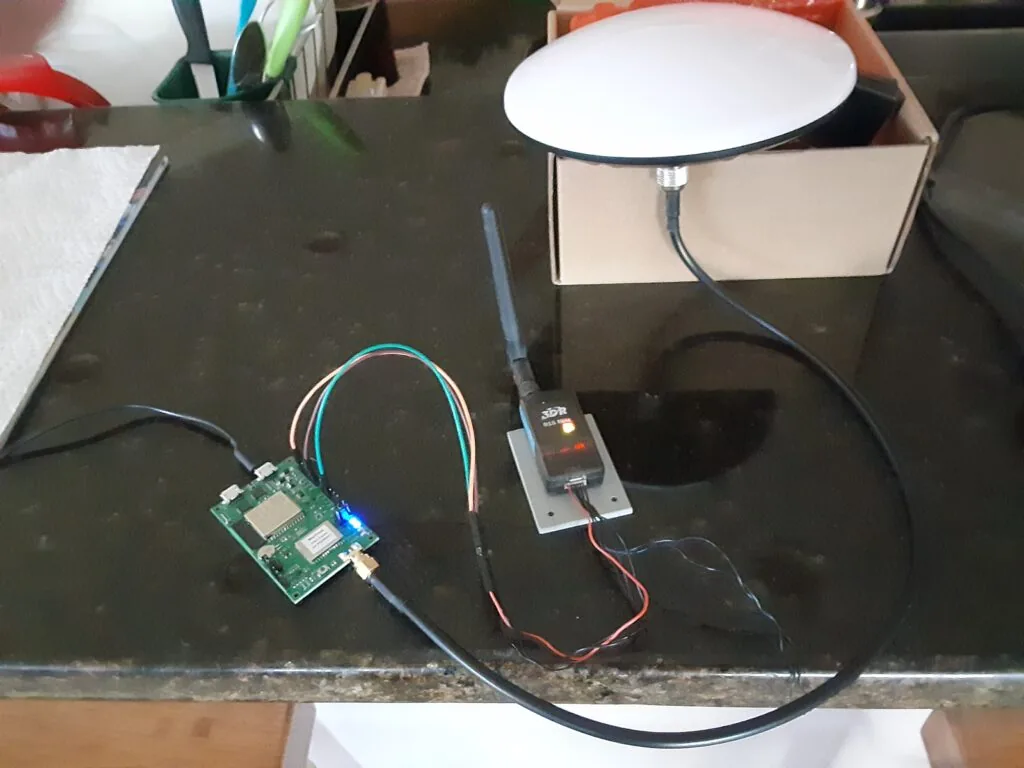
Paso 2: conectar la radio de telemetría SiK
Una vez configurada la placa, elige una carcasa adecuada y monta la radio SiK junto con la antena de grado topográfico. Para saber dónde están los pines que necesitas, usa el procedimiento Very Quick Short Baseline Test (1/2) de la página 13 de la guía: ahí se identifican los pines TX, GND y 5V_O de la placa de evaluación que van a la radio SiK.
El cableado entre la placa y la radio queda así:
- Pin TX de la placa al pin RX (2) de la radio SiK.
- Pin GND de la placa al pin Ground (6) de la radio SiK.
- Pin 5V_O de la placa al pin Power (1) de la radio SiK.
Un detalle clave: el pin TX de la placa debe quedar a 57.600 baudios. A diferencia de SparkFun, los diseñadores de NavSpark no usaron una UART separada para los mensajes RTCM, así que el puerto USB1 y la UART TX/RX comparten la misma velocidad. No es un problema: los mensajes RTCM que salen por USB1 son solo para observación con el GNSS Viewer, donde la velocidad no importa.
Paso 3: verificar la salida de correcciones RTCM
El último ajuste antes de probar es confirmar que la base realmente esté generando mensajes de corrección. En el GNSS Viewer abre la pestaña RAW y selecciona Configure RTCM Measurement Data Out.
La configuración por defecto de "RTCM Measurement Data Out" es muy parecida a la que SparkFun recomienda para el ZED-F9P, así que en general puedes dejarla tal cual. Si decides cambiar algo, asegúrate de seleccionar Update to SRAM+Flash y recién ahí presionar el botón Accept, para que los cambios queden guardados en la placa y no se pierdan al apagar.
Paso 4: la prueba de fuego
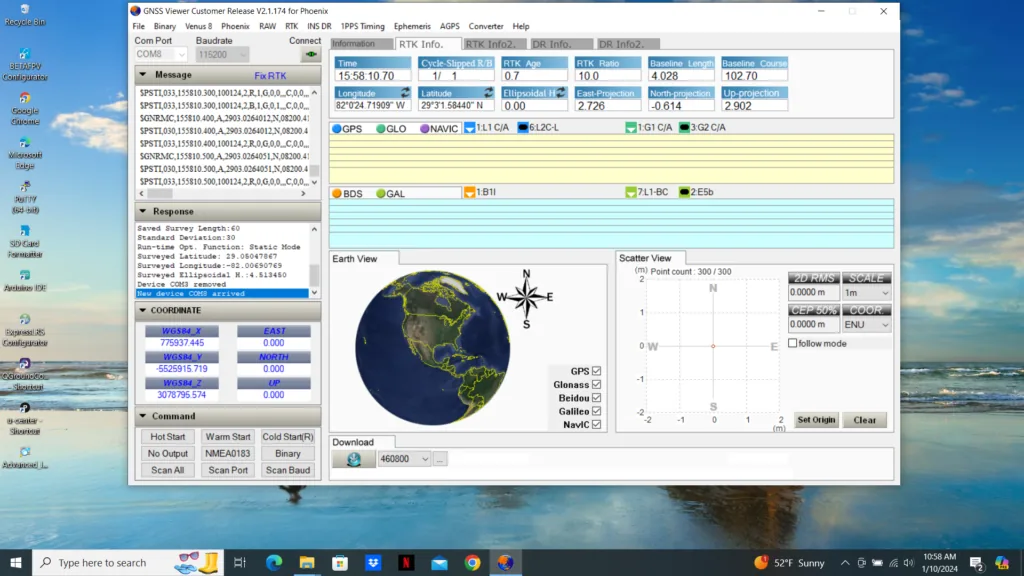
Con la base lista, llega el momento de comprobar que el rover reciba el Fix RTK. El procedimiento es:
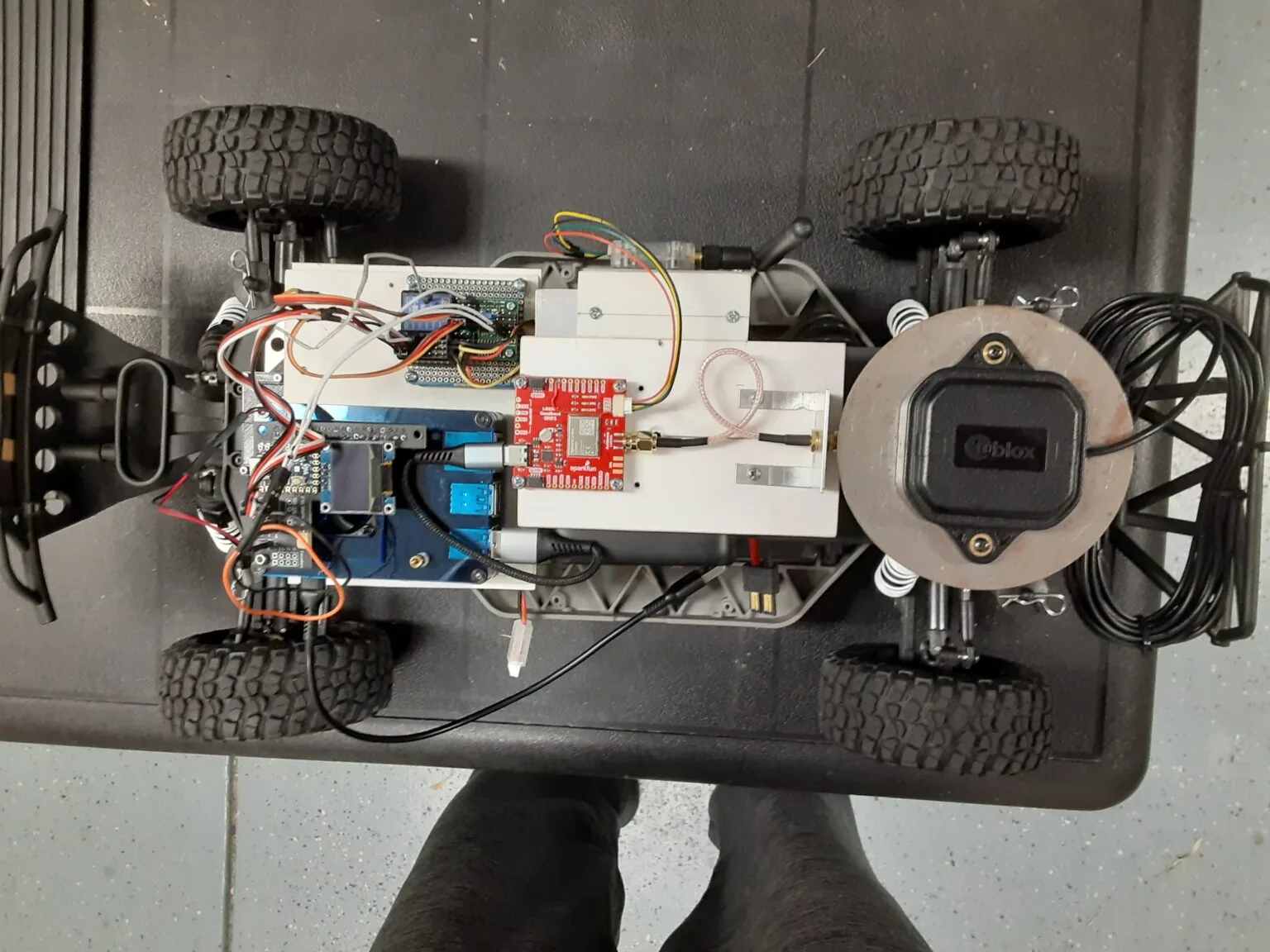
- Conecta la placa breakout PX1122R del rover (sobre tu auto) al notebook con el GNSS Viewer corriendo, usando el conversor UART a USB de SparkFun.
- Enchufa la salida USB1 de la estación base a una fuente de 5 V adecuada.
- Observa cómo el estado en la barra de mensajes del GNSS Viewer del rover va cambiando: primero Position fix 2D, luego Float RTK y finalmente Fix RTK.
Ese salto a Fix RTK ocurre una vez que la base terminó su Survey Mode y empezó a transmitir las correcciones RTCM. Si en tu rover usas un módulo SparkFun ZED-F9P, lo notarás también por su LED amarillo: pasa de amarillo fijo a parpadeante (Float) y finalmente se apaga por completo (Fix).

Variantes y mejoras
Esta base "pelada" cumple, pero hay varias formas de hacerla crecer:
- Antena de doble banda económica: si recién empiezas y el presupuesto aprieta, la Beitian BT-160 (alrededor de USD 78) entrega un rendimiento muy cercano al de la SparkFun por bastante menos plata. Una buena puerta de entrada antes de invertir en la antena L1/L2/L5.
- Caja resistente a la intemperie: como la base queda fija al aire libre durante las carreras, vale la pena montarla en una caja de proyectos estanca (IP65 o IP67) en lugar de una carcasa simple. Así proteges la placa del polvo, la humedad y el sol de la pista.
- Alimentación autónoma con panel solar: para sesiones largas en terreno, puedes reemplazar el power bank por un pequeño sistema de carga solar que mantenga los 5 V sin depender de un enchufe ni de recargar el banco a mano.
- Survey más estable: si vas a dejar la base en una posición permanente (por ejemplo una pista fija de práctica), sube el tiempo de Survey bien por encima de los 600 segundos para fijar el punto base con la mayor precisión posible una sola vez.
Personalización para Chile
Acá llega la parte honesta. El corazón de este proyecto (la placa PX1122R L1/L2 RTK, la antena de grado topográfico y la radio de telemetría SiK) son componentes especializados de GNSS de doble banda que no forman parte del catálogo de MechatronicStore. Estos hay que importarlos desde NavSpark (Taiwán), SparkFun o vendedores especializados, considerando el costo de envío internacional.
Lo que sí encuentras en MechatronicStore son los accesorios genéricos del montaje: cajas de proyecto estancas (IP65/IP67) para proteger la placa a la intemperie, módulos de power bank y baterías 18650 para armar la alimentación de 5 V, y cables. No los linkeamos como "los productos del proyecto" porque el RTK de precisión centimétrica vive en ese hardware importado que no vendemos. Preferimos ser transparentes a forzar un interlinking que no te ayude a replicar la base.
Un dato útil para makers chilenos: los módulos GPS de banda simple que se consiguen localmente (como el NEO-8M, NEO-6M o ATGM336H) sirven de maravilla para geolocalización general, logging y proyectos de seguimiento, pero no alcanzan la precisión RTK centimétrica que pide una carrera de autos RC autónomos. Para eso sí o sí necesitas hardware de doble banda como el de este tutorial.
Recursos
- Tutorial original (en inglés): Towards an affordable Base Station for outdoor RTK GPS RC Car racing, por Tom Coyle en DIY Robocars.
- Post relacionado del autor: Using the Donkey Car Path_Follow Template with RTK GPS
- Guía de configuración de la placa: Getting Started with PX1122R RTK Evaluation Board (PDF)
- Tienda del módulo: PX1122R EVB en NavSpark Store
- Documentación DonkeyCar: docs.donkeycar.com
Versión chilena inspirada en el trabajo de Tom Coyle (DIY Robocars), adaptada con contexto local de componentes.