Tener un auto que aprende a manejar solo dejó de ser ciencia ficción. Con la plataforma Donkeycar y un Raspberry Pi adentro, puedes entrenar un modelo de visión que recorra una pista a punta de cámara, sin sensores caros ni LIDAR. El problema aparece apenas sacas el Waveshare PiRacer Pro de su caja: el hardware es excelente, pero el software que trae de fábrica quedó congelado en una versión que el propio proyecto Donkeycar ya no mantiene.
En esta guía vas a partir de cero: grabar un sistema operativo limpio, instalar la última versión de Donkeycar y dejar activados los dos accesorios propios del PiRacer que normalmente quedan apagados (la pantalla OLED y el gamepad). Al terminar, tu auto va a estar listo para entrenar y correr como cualquier otro Donkeycar, pero con el stack al día.
Por qué reinstalar es el primer paso (y no opcional)
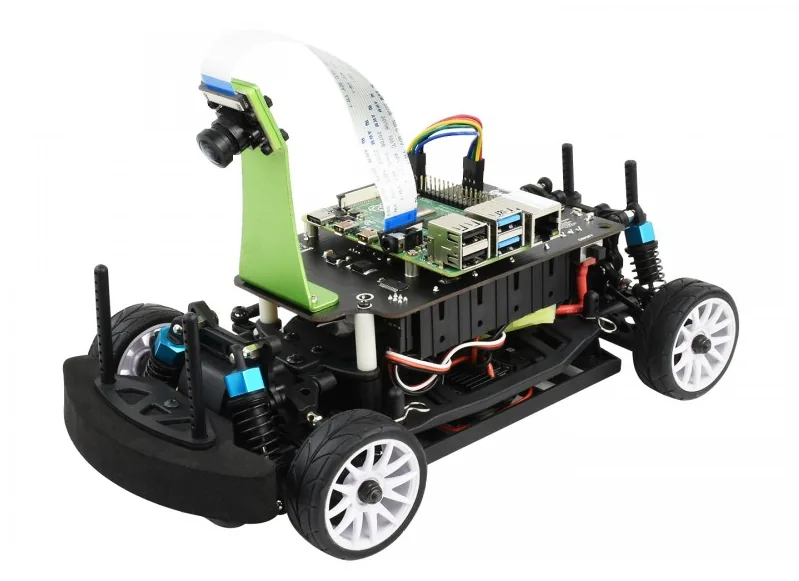
El PiRacer Pro es, en palabras del creador del tutorial original, uno de los mejores autos listos para usar del ecosistema Donkeycar a nivel de hardware: chasis robusto, dirección Ackermann, cámara, OLED y un gamepad incluidos. El precio ronda los 268 dólares (aproximadamente CLP $260.000, según el tipo de cambio del día).
La contra está en el software. La imagen preinstalada usa una versión de Donkeycar antigua que ya no recibe actualizaciones. Si intentas seguir tutoriales nuevos sobre esa base, te vas a topar con librerías que no calzan y comandos que cambiaron de nombre. Por eso conviene borrar todo y empezar con una instalación fresca: es más rápido que parchar lo viejo y te deja alineado con la documentación oficial.

Paso 1: grabar Raspberry Pi OS en la microSD
El primer movimiento es dejar la tarjeta microSD con un sistema operativo limpio. Descarga la última versión de Raspberry Pi OS y grábala en la tarjeta siguiendo la guía oficial de Donkeycar para preparar el SBC (link en la sección de Recursos). Lo más cómodo es usar Raspberry Pi Imager desde tu computador: seleccionas el sistema, eliges la microSD y dejas que el programa haga el resto.
Un consejo práctico: aprovecha la opción avanzada del Imager para preconfigurar el nombre de la red WiFi, la contraseña y habilitar SSH antes de grabar. Así, cuando enciendas el Raspberry Pi por primera vez, ya vas a poder entrar de forma remota sin necesidad de conectarle pantalla ni teclado.
Paso 2: actualizar el sistema y habilitar I2C
Con la tarjeta lista y puesta en el Raspberry Pi, conéctate por SSH. Lo primero es poner el sistema al día con estos dos comandos:
sudo apt update
sudo apt upgrade
Después viene un detalle que mucha gente olvida y que después le hace perder horas de depuración: hay que activar el bus I2C. El PiRacer usa I2C para hablar con el driver de motores y con la pantalla OLED, así que si queda deshabilitado, esos componentes simplemente no responden. Abre la herramienta de configuración:
sudo raspi-config
Dentro del menú, entra a las opciones de interfaces y activa I2C. Confirma, sal del menú y, si te lo pide, reinicia. Solo después de esto tiene sentido seguir adelante.
Paso 3: crear la aplicación Donkeycar
Ya con el sistema actualizado y el I2C activo, toca instalar Donkeycar propiamente tal y crear tu auto. Sigue la guía oficial para crear la aplicación (link en Recursos): ahí se descarga el framework y se genera la carpeta de trabajo de tu vehículo, que por convención se llama mycar.
Dentro de esa carpeta vive el archivo clave de este proyecto: myconfig.py. Ese archivo es el panel de control de tu auto. Casi todo viene comentado por defecto (cada línea empieza con #), de modo que la idea es ir descomentando solo lo que tu hardware necesita. En los próximos dos pasos vamos a tocar exactamente dos cosas: la pantalla y el control.
Paso 4: activar la pantalla OLED
El PiRacer trae una pequeña pantalla OLED que muestra datos útiles mientras manejas. Para encenderla, abre myconfig.py con tu editor favorito (por ejemplo nano myconfig.py), busca la línea del display SSD1306, quítale el # del inicio y déjala en True:
USE_SSD1306_128_32 = True

Un punto importante para que no te asustes después: la OLED no se va a encender al instante. Solo muestra texto cuando Donkeycar está corriendo, es decir, más adelante, cuando lances el modo de manejo con python manage.py drive. Si después de descomentar la línea la pantalla sigue negra y todavía no iniciaste ese comando, es el comportamiento esperado, no una falla.
De paso, vale la pena entender por qué la pantalla necesita el I2C del Paso 2: el SSD1306 se comunica justamente por ese bus. Si saltaste la activación de I2C, esta línea no va a servir de nada por más que la dejes en True.
Paso 5: habilitar el gamepad incluido
El auto incluye un gamepad inalámbrico que sirve tanto para manejar a mano como para grabar los datos con los que después vas a entrenar el modelo. Para que Donkeycar lo use por defecto, en el mismo myconfig.py busca la opción del joystick, descoméntala y déjala en True si no lo está ya:
USE_JOYSTICK_AS_DEFAULT = True
Por defecto, Donkeycar va a asumir que el control está en modo Xbox. Para asegurarte de que efectivamente quede en ese modo, hay un truco físico en el propio gamepad: enciéndelo y mantén presionado el botón Home durante 7 segundos. Con eso el control se fuerza a modo Xbox y Donkeycar lo reconoce sin configuración extra.
Si al probar el control no responde, revisa dos cosas antes de cualquier otra: que hiciste el gesto de los 7 segundos en el botón Home y que USE_JOYSTICK_AS_DEFAULT quedó realmente en True y sin el # adelante.
Listo para entrenar
Eso es todo lo que el PiRacer Pro necesita de especial. A partir de aquí, tu auto se comporta como cualquier otro Donkeycar: puedes manejarlo con el gamepad para recolectar imágenes, entrenar un modelo con esos datos y luego dejar que conduzca solo en la pista. El siguiente capítulo natural es la guía de manejo y entrenamiento de la documentación oficial.
Variantes y mejoras
Una vez que tengas la base funcionando, hay varias formas de subir el nivel del proyecto:
- Telemetría a tu celular o PC: Donkeycar levanta una interfaz web local mientras maneja. Conectado a la misma red WiFi, puedes ver la cámara en vivo y supervisar el entrenamiento desde el navegador, sin tocar el auto.
- Mejor cámara para visión más nítida: si quieres un dataset de mayor calidad, un módulo de cámara IMX219 dedicado para Raspberry Pi entrega imágenes más limpias que ayudan al modelo a generalizar mejor en distintas condiciones de luz.
- Autonomía extendida en pista: agregar una batería de mayor capacidad o un banco de energía te permite sesiones de entrenamiento más largas sin tener que estar recargando entre vueltas.
- Pista propia en casa: con cinta de enmascarar y un poco de espacio puedes armar un circuito ovalado en el piso. Mientras más consistente sea la pista, más rápido aprende el modelo.
Personalización para Chile
El kit Waveshare PiRacer Pro completo no se vende en Chile, pero los consumibles y repuestos clave sí los consigues localmente en MechatronicStore para no quedar parado a mitad del proyecto:
- Módulo cámara IMX219 para Raspberry Pi (SKU GS2-6): $34.990 CLP. Es la cámara de visión adecuada para conducción autónoma estilo Donkeycar y queda lista para el conector CSI del Raspberry Pi.
- Micro SD tarjeta de memoria 32GB: alrededor de $7.990 CLP. La necesitas sí o sí para grabar Raspberry Pi OS y Donkeycar; una de 32GB sobra para el sistema más tus datasets.
Si en el futuro reemplazas el Raspberry Pi del kit, en el catálogo encuentras placas Raspberry Pi y accesorios como disipadores y carcasas para mantener la electrónica fría durante las sesiones largas de entrenamiento.
Recursos
- Tutorial original (inglés): Tips for installing Donkeycar on the Waveshare PiRacer Pro, por zlite en DIY Robocars.
- Documentación Donkeycar: preparar Raspberry Pi: Setup Raspberry Pi
- Documentación Donkeycar: crear la aplicación: Create Application
- Documentación Donkeycar: manejar y entrenar: Get Driving
- Hardware de referencia: Waveshare PiRacer Pro AI Kit
Versión chilena basada en el tutorial original de DIY Robocars, ampliada con contexto técnico y componentes en stock local en MechatronicStore.