Durante años, las cortadoras de pasto robóticas vivieron atadas a un cable enterrado en el perímetro del jardín: el robot detectaba ese alambre y rebotaba dentro del área, cortando de forma aleatoria y muchas veces repitiendo la misma franja. Eso cambió. Hoy el GPS RTK bajó a precios de hobbista, y eso permite algo que antes era ciencia ficción casera: un robot que corta el pasto siguiendo rutas planificadas al centímetro, fila por fila, sin repetir y sin cables enterrados.
En este tutorial vas a recorrer cómo se construye un prototipo funcional de cortacésped autónomo de bajo presupuesto: el chasis, la tracción diferencial, el cabezal de corte, la energía y, lo más interesante, el cerebro de navegación basado en GPS RTK que graba y reproduce la ruta de corte. Es un proyecto de robótica avanzada, ideal si ya cortaste los dientes con robots móviles más simples y quieres dar el salto a navegación autónoma de exteriores.
Advertencia de seguridad: léela antes de seguir
Esto es importante y va primero. Una cortadora de pasto, aunque sea pequeña, tiene una cuchilla girando a alta velocidad: es una máquina genuinamente peligrosa. Este artículo describe un proceso de construcción con fines educativos y de experimentación, no es un manual ni una guía oficial para fabricar cortadoras autónomas. Si decides construir algo así, lo haces bajo tu propia responsabilidad y riesgo.
Además, una consideración ética y legal: el Código de Conducta para Desarrolladores de ArduPilot excluye explícitamente su uso en sistemas donde el software queda efectivamente a cargo de vidas humanas. Una máquina con cuchilla que se mueve sola entra de lleno en esa zona gris. Nunca la dejes operar sin supervisión, mantené alejados a niños y mascotas, y diseñá siempre un corte de emergencia accesible. Tomado en serio, este es un excelente proyecto de aprendizaje; tomado a la ligera, es un riesgo real.
Anatomía del robot: cinco subsistemas
Una cortadora robótica autónoma típica se descompone en cinco bloques: un chasis, un sistema de tracción, un cabezal de corte, una fuente de energía y un sistema de guiado de la trayectoria. Vamos a armar cada uno por separado y después los integramos.
El chasis y la placa principal
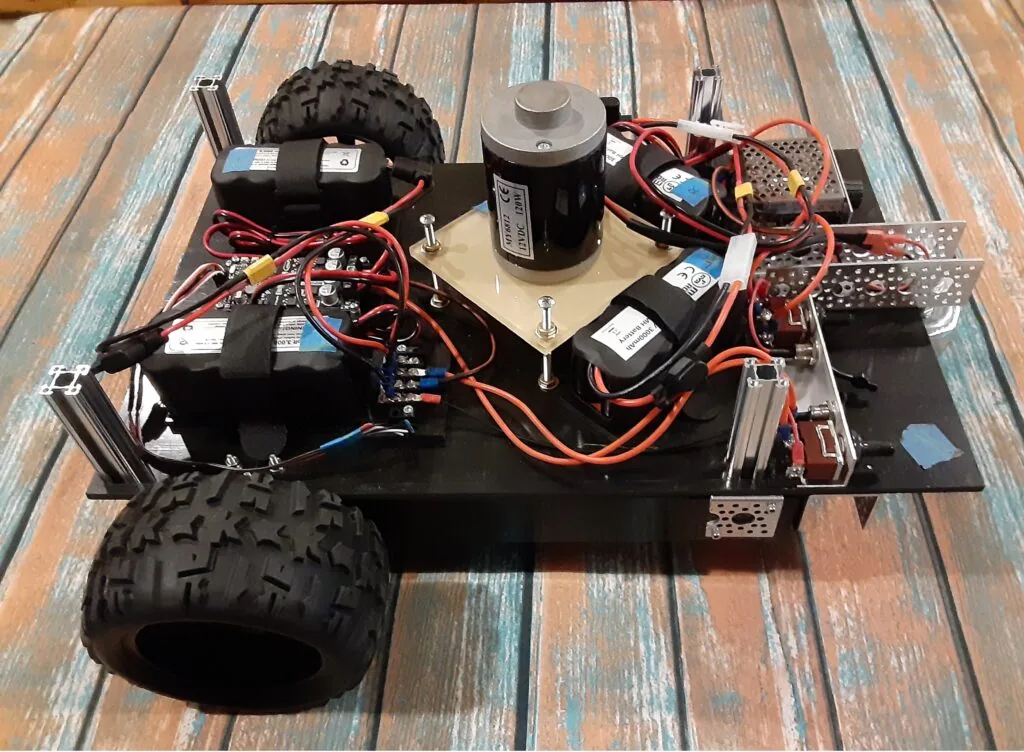
La base es práctica y barata: dos planchas de plástico ABS negro de 6 mm (1/4 de pulgada) de espesor. La plancha grande mide unos 48 x 30 cm (19 x 12 pulgadas) y la chica 38 x 30 cm (15 x 12 pulgadas). La plancha grande es el corazón mecánico: ahí se montan el controlador de dirección, los motores de tracción, el motor del cabezal de corte, las baterías, los interruptores de potencia y el controlador de velocidad.
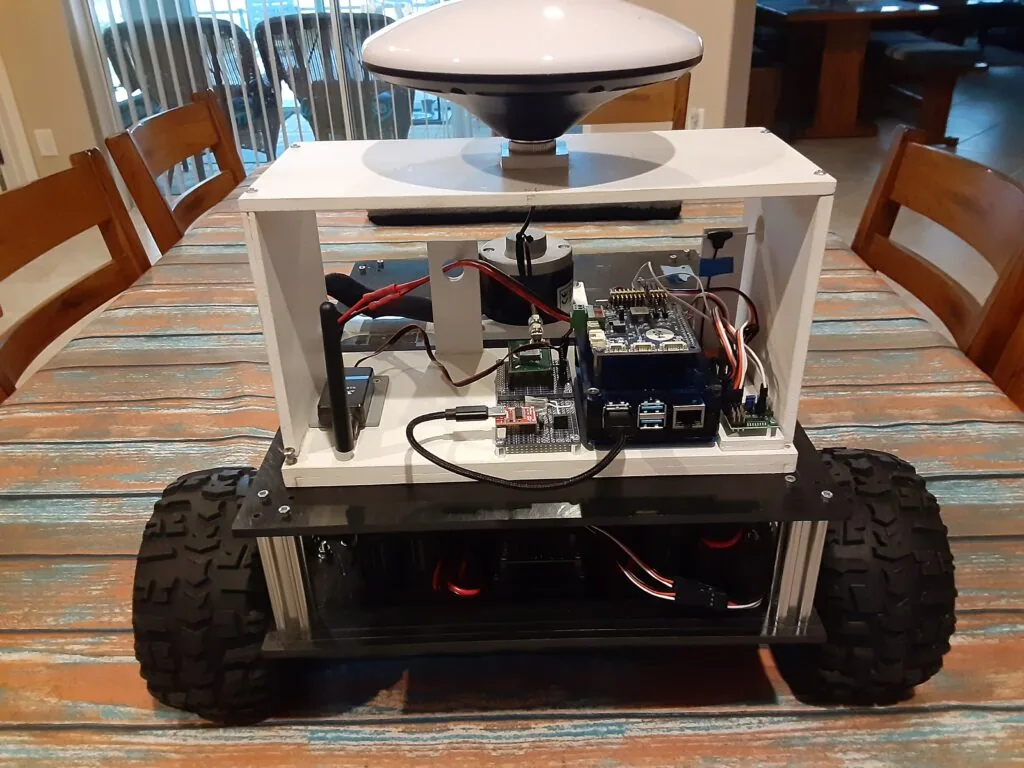
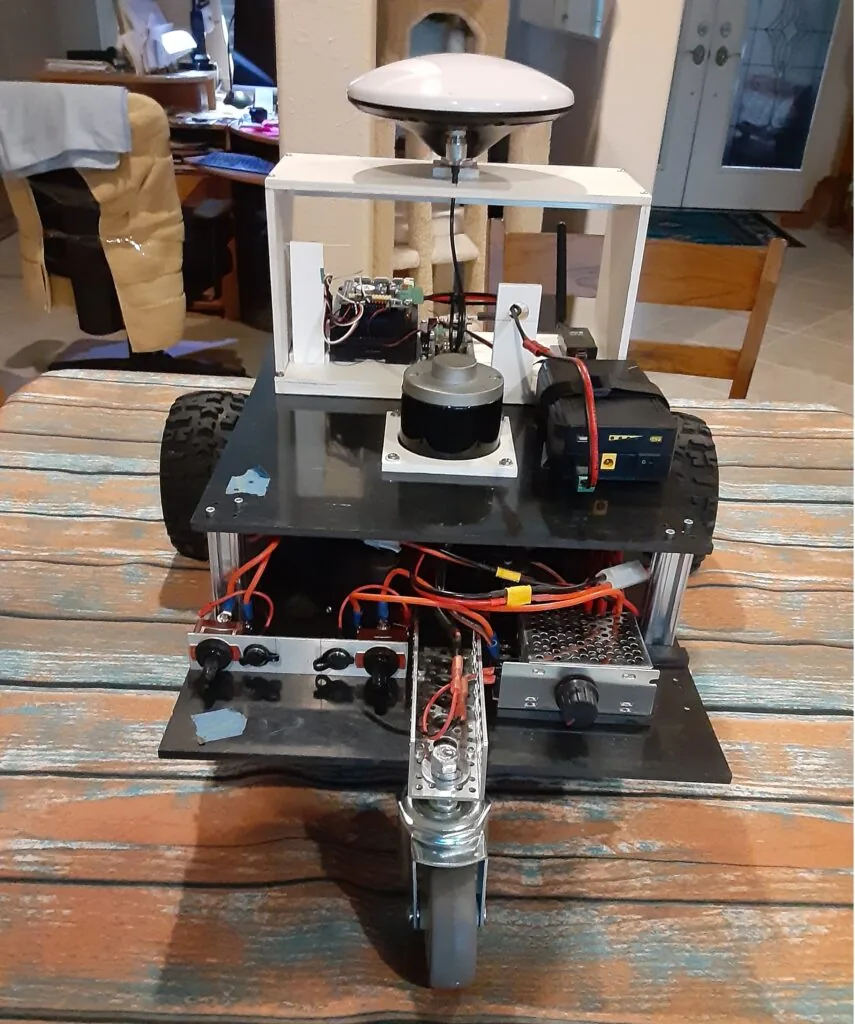
La plancha chica se monta arriba de la grande, separada por cuatro postes de perfil de aluminio de 72 mm, uno en cada esquina, con tornillería métrica. Esa segunda planta es donde después vive el módulo de guiado GPS RTK, lejos del ruido eléctrico de los motores.
Tracción: dirección diferencial sin eje direccional
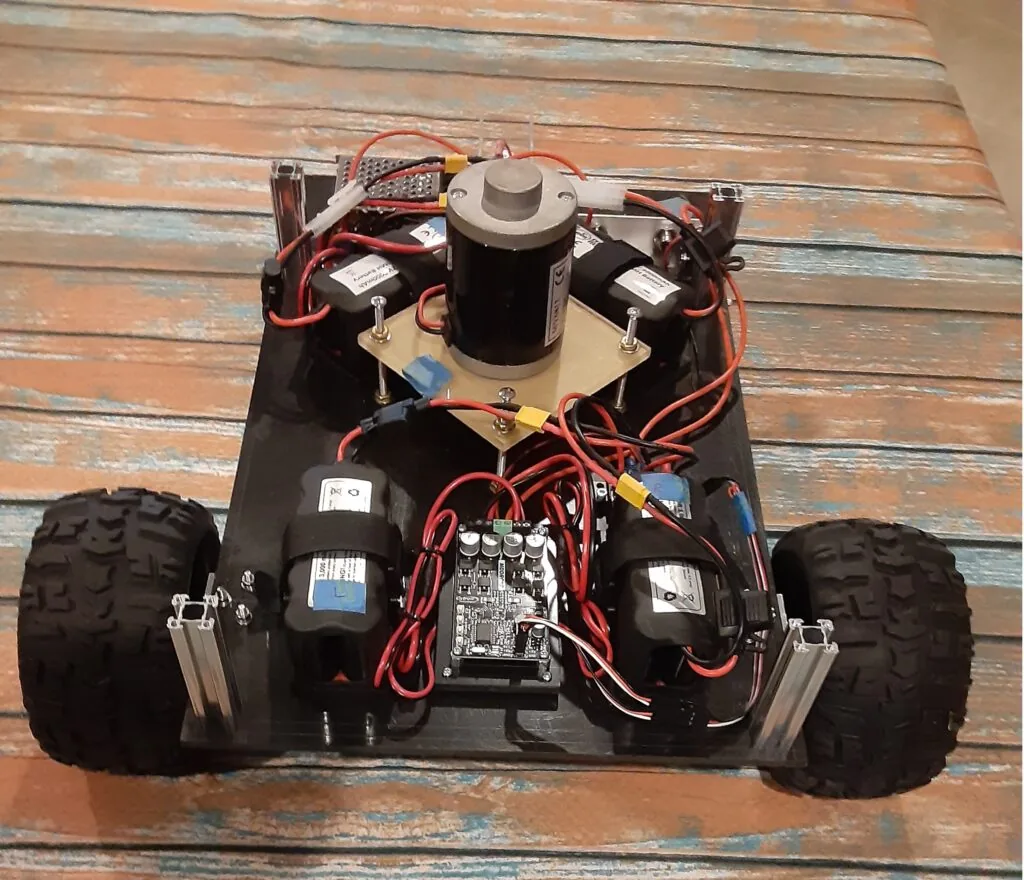
Acá hay un concepto clave de robótica móvil que conviene entender bien. Este robot no tiene un volante ni un eje que gire como un auto. Usa dirección diferencial: dos motores independientes, uno por rueda, y una rueda loca (caster) atrás que solo se deja arrastrar. ¿Cómo dobla entonces? Variando la velocidad relativa de cada rueda. Si la rueda izquierda gira más rápido que la derecha, el robot vira a la derecha; si giran iguales, avanza recto; si giran en sentidos opuestos, pivotea sobre su propio eje. Es el mismo principio de un tanque, y es mucho más simple mecánicamente que un sistema con dirección Ackermann.
El controlador de dirección diferencial recibe las señales PWM de dirección y aceleración desde el módulo de guiado y las convierte en voltajes diferenciales que mueven los dos motores de tracción de 12 V DC. Esos motores son reductores planetarios (en el build original, modelos con relación 99.5:1, pensados para entregar torque a baja velocidad, que es justo lo que necesitas para empujar sobre pasto grueso).
Los motores van montados en perfil tipo canal U con escuadras en L, y se acoplan a ruedas y neumáticos de RC tipo monster truck (hexágono de 17 mm) usando una cadena de adaptadores: una abrazadera para eje plano tipo D, un adaptador de hexágono de 12 mm y finalmente un adaptador de 12 mm a 17 mm. Atrás, una rueda loca de 7.5 cm (3 pulgadas) de diámetro completa el triángulo de apoyo.
El cabezal de corte
El motor del cabezal tiene un eje de 8 mm. Para conectarlo a un cabezal de corte comercial (en el proyecto original se usó un cabezal de hilo tipo "empuja y carga", el mismo que llevan muchas orilladoras), se usa un adaptador roscado de 8 mm a 10 mm: el extremo de 10 mm calza justo en el agujero de montaje del cabezal.
El motor de corte se monta en su propia plataforma con altura ajustable, y su eje roscado atraviesa la plancha principal para acoplar el cabezal por debajo del chasis. Así la cuchilla queda al ras del suelo y el motor protegido arriba.

Energía: por qué NiMH y no LiPo
La alimentación viene de dos pares de baterías de 12 V DC. Un par alimenta el controlador de dirección (y por ende los motores de tracción), y el otro alimenta el controlador de velocidad del cabezal de corte.
La elección de baterías de NiMH de 12 V y 3 Ah en lugar de LiPo no es casual y vale la pena explicarla, porque va contra la intuición de muchos makers que asumen "LiPo siempre". Hay dos razones de fondo:
- Carga sin desmontar: las NiMH se pueden cargar sin sacarlas del chasis y sin necesitar un cargador balanceador, a diferencia de las LiPo que exigen balanceo celda por celda. Eso simplifica enormemente la operación diaria.
- El peso es un aliado: las NiMH son más pesadas que las LiPo, y en este proyecto eso es deseable. El peso extra mantiene el chasis pegado al suelo y avanzando de forma estable sobre pasto grueso, donde un robot demasiado liviano patinaría.
Los interruptores de potencia son un par de tipo SPDT con posición central de apagado (OFF). Esa posición central permite tres modos: dar potencia al controlador de dirección, dar potencia al controlador del cabezal, o cargar los pares de baterías por sus puertos de carga. Es un detalle elegante que evita conectores sueltos.
Un punto fino de ingeniería: el cabezal de corte se alimenta a través de un controlador PWM de velocidad variable. ¿Por qué no un simple interruptor? Porque los motores DC consumen la corriente máxima en el arranque o cuando están en bloqueo (stall). Con el control PWM puedes encender el cabezal y subirlo gradualmente hasta la velocidad de corte deseada, lo que protege a las baterías NiMH de un pico de corriente brusco al arrancar. Arranque suave, batería feliz.
El cerebro: navegación con GPS RTK
Ya tenemos el robot armado mecánicamente. Ahora la pregunta interesante: ¿cómo logra cortar una franja no repetitiva, fila tras fila, hasta terminar el jardín completo? Acá entra el módulo de guiado GPS RTK, y es lo que distingue a este proyecto de un robot que rebota al azar.
Primero, por qué RTK y no GPS normal. Un GPS de celular o de auto te da una precisión de varios metros: suficiente para no perderte en la ciudad, inútil para cortar el pasto sin pisar los canteros. El RTK (Real Time Kinematic) usa una estación base fija que conoce su posición exacta y transmite correcciones (mensajes RTCM) al robot en movimiento. Con esas correcciones, el receptor en el robot pasa de varios metros de error a precisión centimétrica. Esa es la diferencia entre un robot que dibuja líneas prolijas y uno que se come tus plantas.
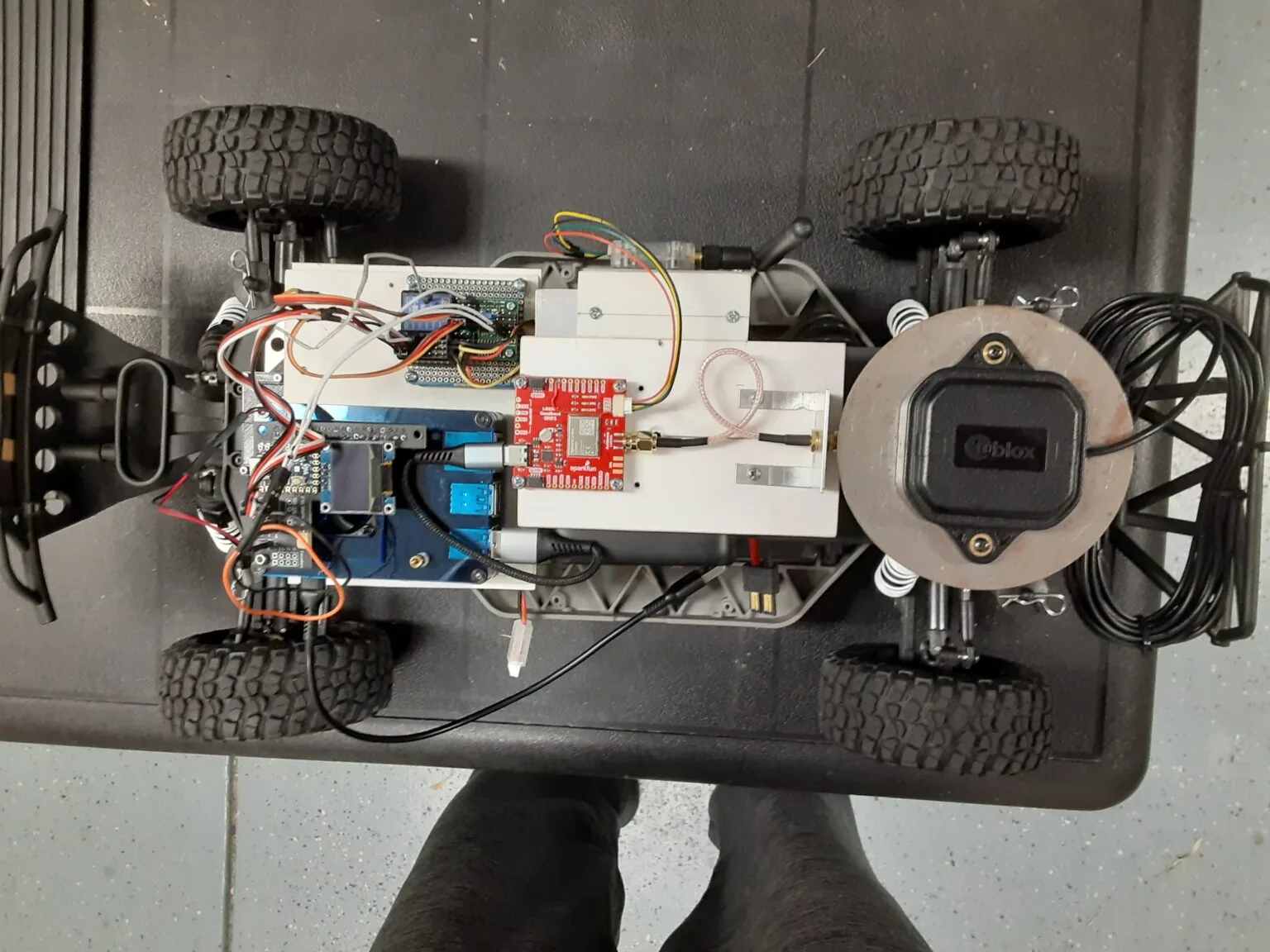
El módulo de guiado se puede armar como prefieras, pero como mínimo debería incluir: un módulo GPS RTK, una antena GPS L1/L2, una radio de telemetría compatible con la radio de la estación base, un mini PC (SBC, Single Board Computer) y un receptor de radio control (RC). Si te gusta usar ArduRover con el protocolo Mavlink, puedes usar una controladora tipo Pixhawk como cerebro y sumarle el receptor RC, la radio de telemetría y el módulo RTK.
En el build original, el módulo usa un GPS RTK que entrega coordenadas X e Y corregidas por RTCM a un mini PC que corre la plantilla path_follow de DonkeyCar, justo la herramienta que graba y reproduce una secuencia de ruta sobre el área de corte.
Grabar y reproducir la ruta de corte
La estrategia de navegación es ingeniosamente simple y se hace en dos fases:
Fase 1, grabar (modo usuario): con un transmisor RC manejas el robot manualmente a través del receptor RC conectado al mini PC por medio de un multiplexor RC (RC Mux). Mientras lo conduces, el sistema graba fila por fila la trayectoria exacta que quieres que el robot corte en esa área.
Fase 2, reproducir (modo automático): dejas el robot al inicio de la ruta grabada, cambias el RC Mux para que ahora la salida del mini PC controle dirección y aceleración (en vez del transmisor RC), pones el robot en modo "Full Auto" y lo ves repetir solo la trayectoria que grabaste antes.
Sí, es un método primitivo comparado con planificar la ruta por software con ArduRover y Mavlink, pero para un build de presupuesto funciona perfectamente y es muy didáctico: literalmente le enseñas el camino una vez y el robot lo memoriza. Esta arquitectura de grabar y reproducir es, además, una gran forma de entender el flujo completo de un robot autónomo antes de meterte en planificación de trayectorias más compleja.
Variantes y mejoras
Este prototipo es un punto de partida, no un diseño cerrado. Algunas ideas concretas para llevarlo más lejos:
- Planificación de ruta por software en vez de grabar a mano: en lugar del método grabar y reproducir, podés migrar a ArduRover con Mavlink y planificar polígonos de corte directamente en un software de estación de tierra. Definís el perímetro del jardín como un polígono y el sistema genera las pasadas paralelas automáticamente, sin tener que conducir el robot manualmente la primera vez.
- Detección de obstáculos: el robot actual sigue la ruta a ciegas. Sumando un sensor ultrasónico HC SR04 al frente o un anillo de sensores, podés detenerlo si aparece un objeto (o una mascota) en la trayectoria. Es una capa de seguridad muy recomendable para una máquina con cuchilla.
- Telemetría inalámbrica y monitoreo: con un módulo LoRa de largo alcance podés enviar el estado del robot (posición, batería, errores) a tu celular o PC mientras opera, e incluso disparar un paro de emergencia remoto. Ojo: una radio LoRa de datos no reemplaza la radio de telemetría Mavlink del enlace de control, es un canal de monitoreo aparte.
- Corte de emergencia físico: más allá del software, agregá un interruptor de hombre muerto o un botón de paro grande y visible que corte la alimentación del cabezal al instante. La seguridad nunca está de más en este proyecto.
Personalización para Chile
La gracia de este proyecto es que el cerebro (lo más caro y difícil de conseguir) sí lo encontrás en stock local en MechatronicStore, sin tener que importar:
- Módulo GNSS RTK de Alta Precisión LC29HDAMD doble banda L1/L5 con antena (SKU F-508) por CLP $82.560. Es exactamente la pieza que da la magia: un receptor RTK con antena que lleva la navegación de metros a centímetros. Reemplaza con creces al combo de "módulo RTK + antena L1/L2" del proyecto original.
Para el mini PC que corre el software de navegación, la Raspberry Pi 5 (4 u 8 GB de RAM) es la opción natural y es la misma familia de SBC que usa el build original para correr la plantilla de seguimiento de ruta. Tené en cuenta que la Pi 5 suele rotar rápido en stock, así que revisá disponibilidad al momento de comprar.
La parte mecánica (motores reductores de 12 V de alto torque, controlador de dirección de alta corriente, cabezal de corte, baterías NiMH de 12 V, perfiles de aluminio y ruedas de RC) corresponde a componentes de potencia y mecánica de mayor escala que conviene cotizar con proveedores de robótica de exterior, ya que exceden la línea de prototipado electrónico. Lo importante es que el subsistema inteligente (GPS RTK más SBC) lo armás con piezas que tenés a mano en Chile.
Recursos
- Tutorial original (inglés): A DIY Autonomous Robotic Lawnmower, por Tom Coyle en DIY Robocars.
- Plantilla de seguimiento de ruta: DonkeyCar path_follow template (documentación oficial).
- Firmware de navegación rover: ArduRover (ArduPilot).
- Código de conducta de desarrolladores ArduPilot: Developer Code of Conduct (importante para el uso responsable de sistemas autónomos).
Versión chilena con reescritura editorial propia y el componente clave (GPS RTK) en stock local en MechatronicStore. Inspirado en el build de Tom Coyle.