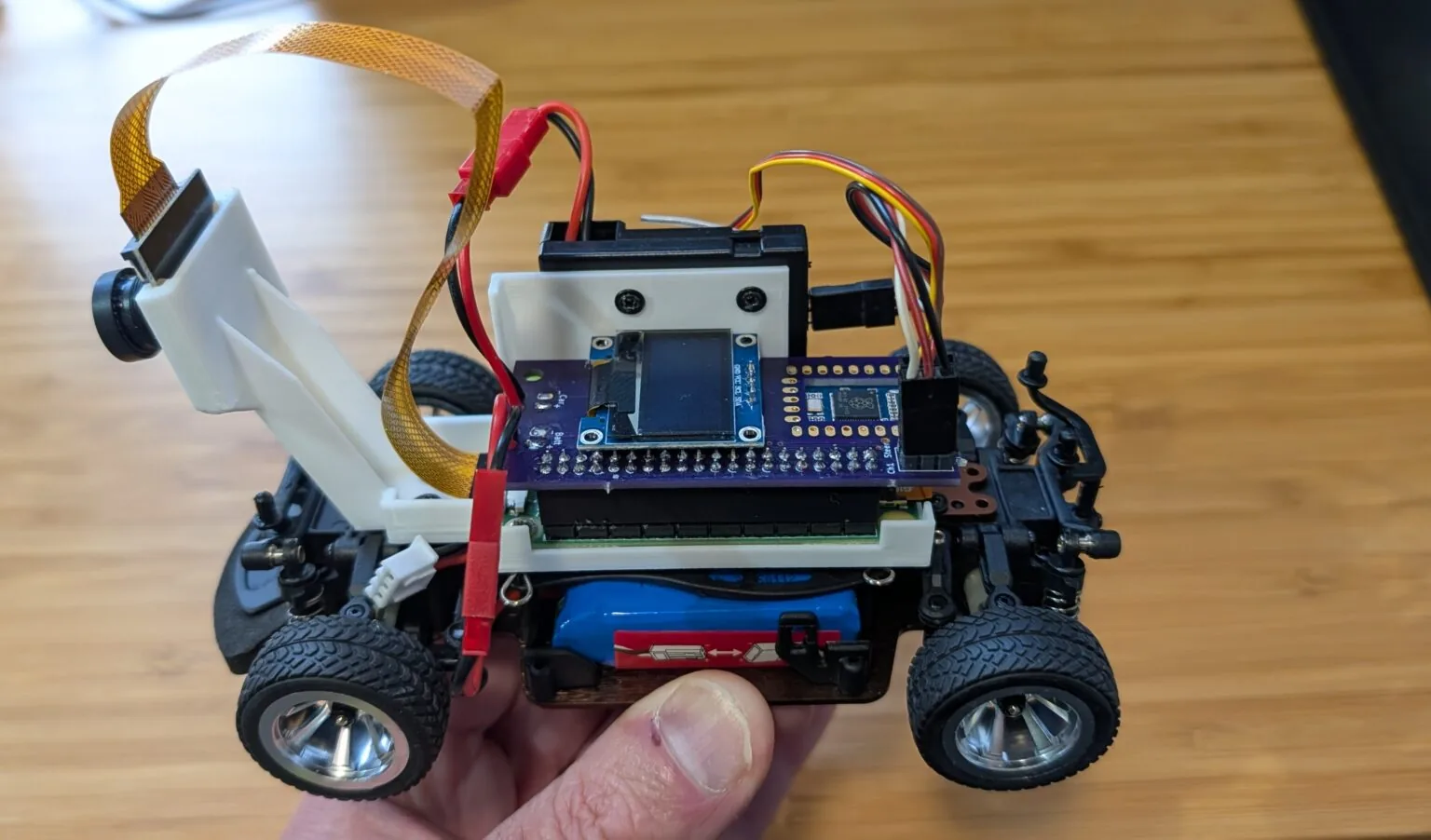
¿Pensabas que un auto que se maneja solo necesitaba un RC grande, un patio enorme y una Raspberry Pi 5? No es así. Con un auto RC escala 1:28, de esos chiquititos y baratos que caben en la palma de la mano, mas una Raspberry Pi Zero 2 W, puedes correr Donkeycar con una red neuronal de extremo a extremo que conduce de forma autónoma. Es perfecto para entrenar adentro de la casa o en un patio chico, donde un RC normal no tiene espacio para girar. Y lo mejor: aprovechas el mismo control remoto con el que viene el auto.
En este tutorial vas a aprender a desarmar el chasis, montar la Pi Zero 2 con su cámara, grabar una versión liviana del sistema optimizada para la poca memoria de la Zero, e instalar Donkeycar para grabar datos, entrenar un modelo y dejar que la IA tome el volante. Todo el proyecto se arma por menos de USD 150 (alrededor de CLP $130.000 aproximado, según el auto que elijas).
Qué vas a necesitar
La gracia de la escala 1:28 es que el receptor RC y el control de motor (ESC) ya vienen integrados en el chasis, así que no tienes que cablear electrónica de potencia. Esto es lo que junta el proyecto:
- Auto RC escala 1:28 (el chasis, con su receptor y ESC integrados).
- Raspberry Pi Zero 2 W mas su cámara CSI.
- Tarjeta microSD de 128GB, aunque con 64GB andas bien.
- Mini RC HAT, que es la placa que conecta la Pi al servo de dirección. Viene con el soporte de montaje, pero si tienes impresora 3D puedes bajar el STL e imprimirlo tú mismo.
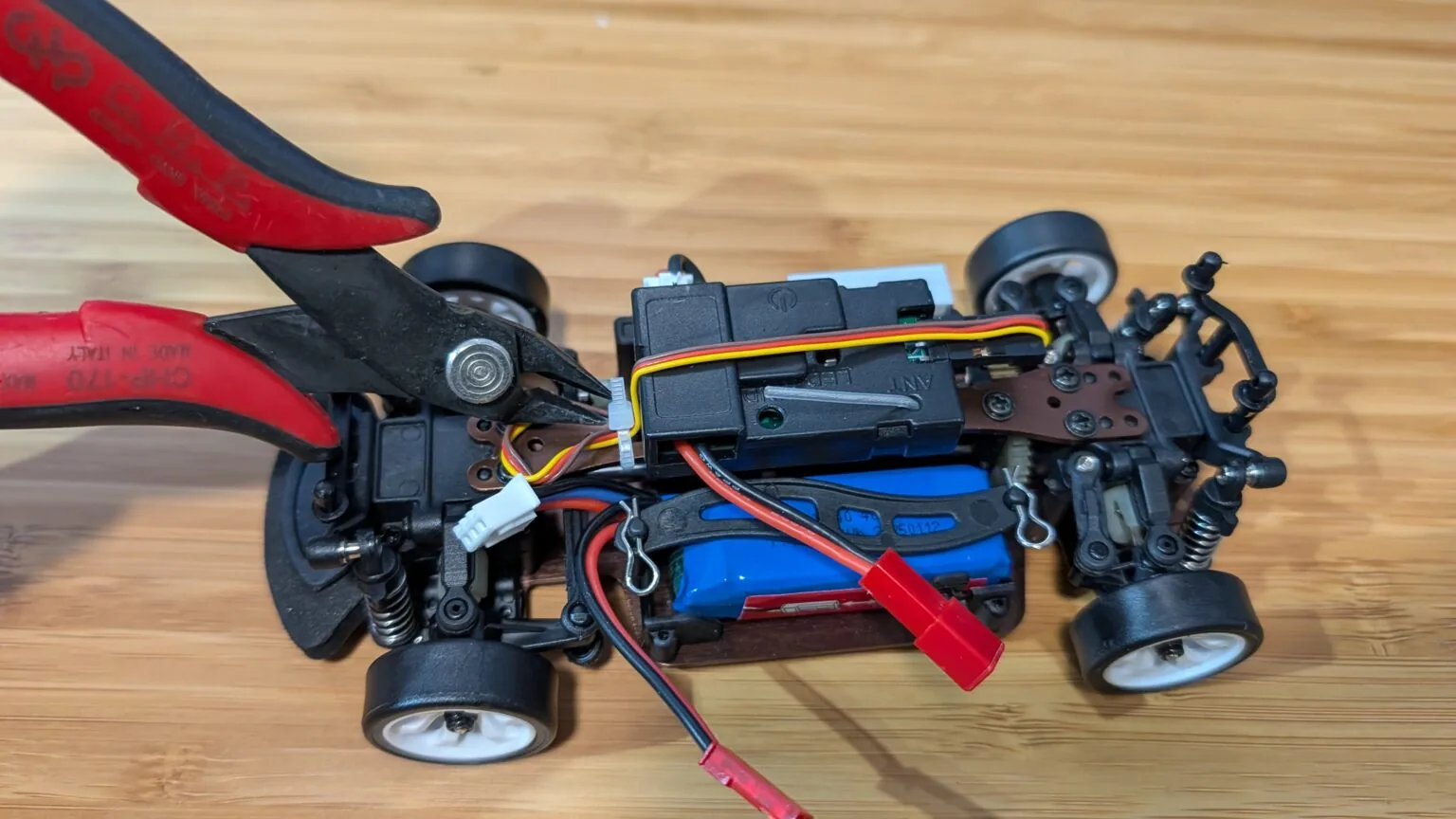
Desarmado del chasis
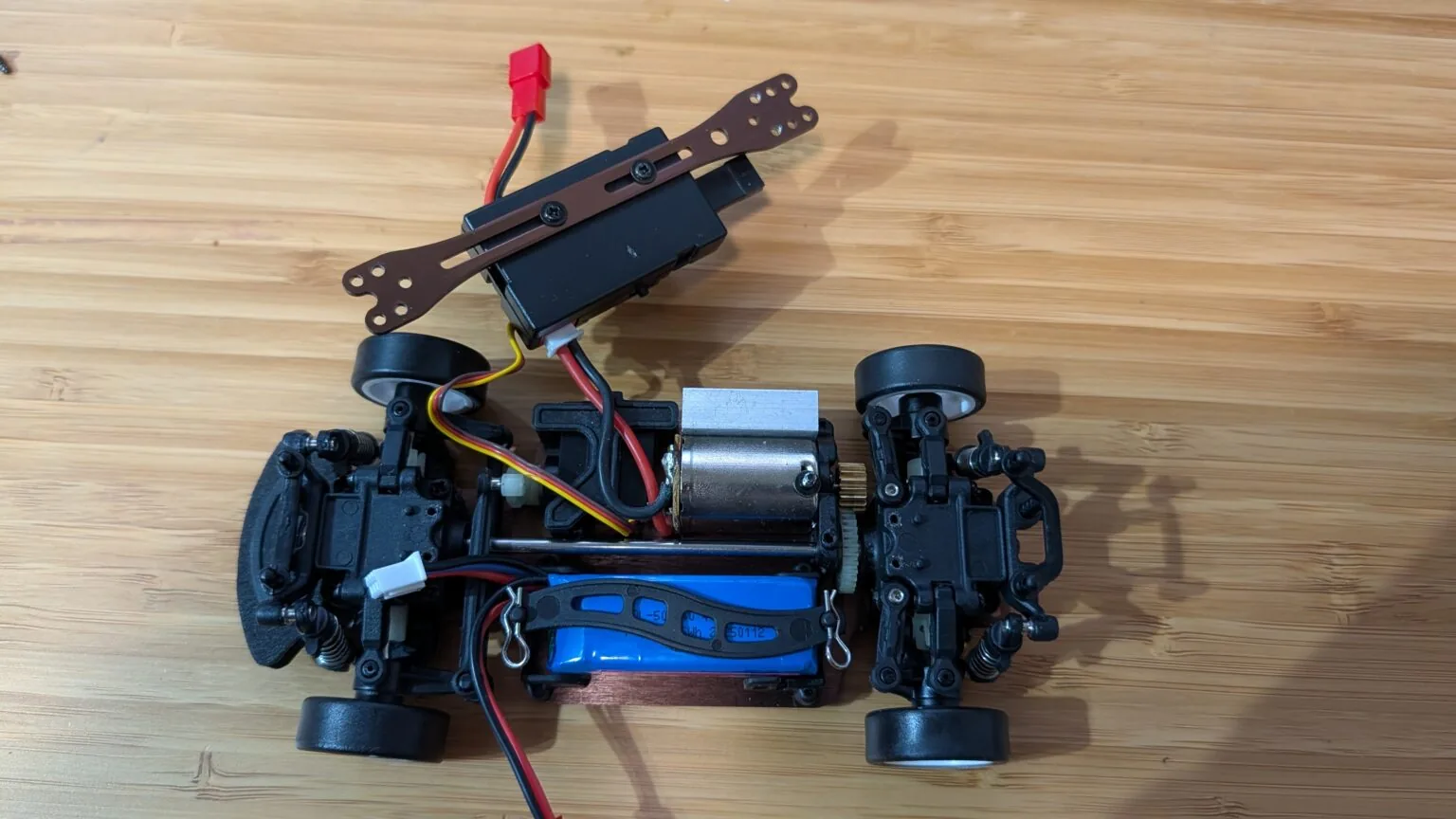
Una vez que tengas el auto, saca la carrocería de plástico y quita la viga central como se muestra abajo. Guarda los tornillos, porque los vas a necesitar después.
Primero, corta con un alicate la amarra plástica que sujeta el cable del servo de dirección.
Después desatornilla los tornillos marcados en rojo en la imagen.
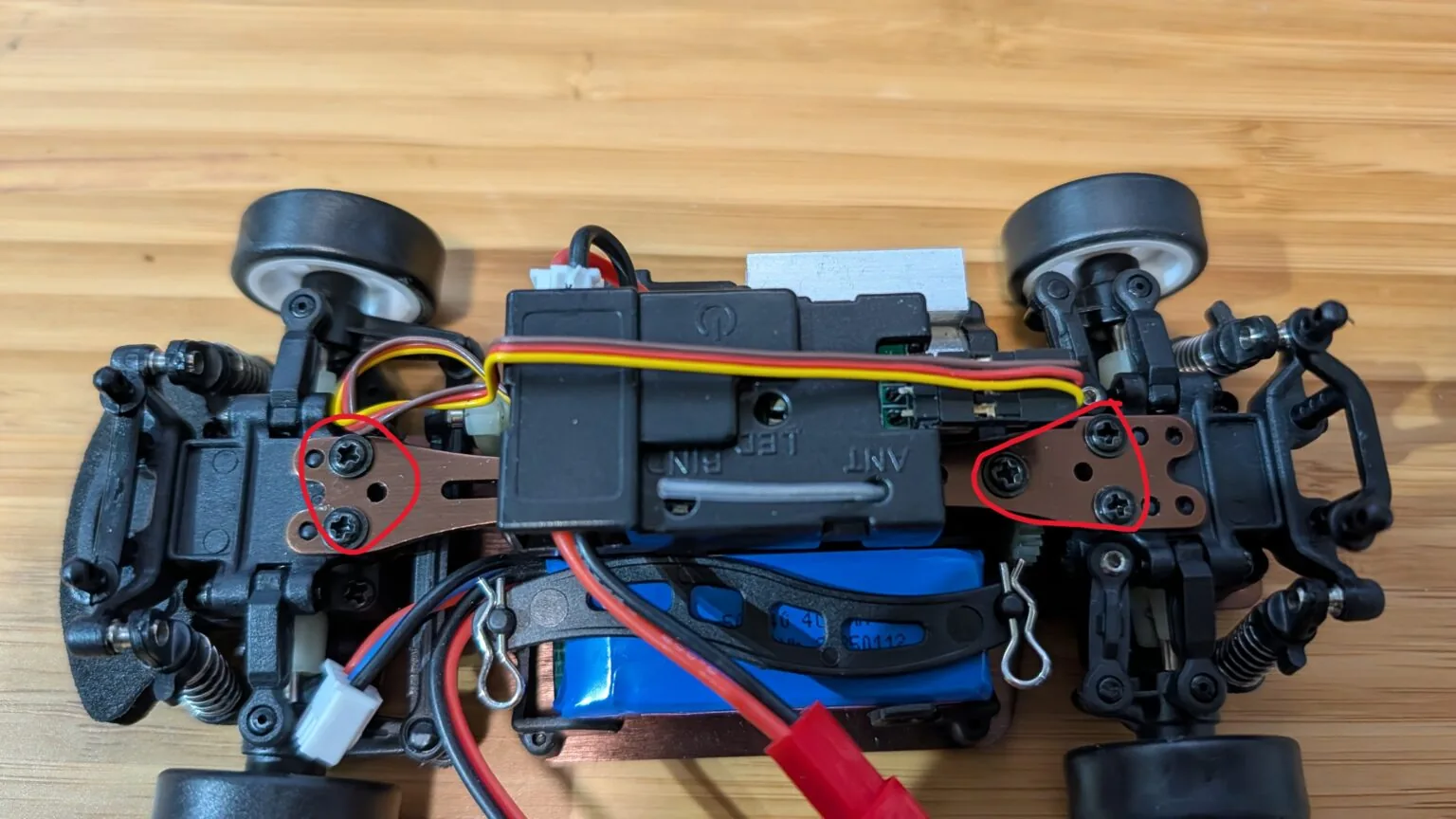
Retira la viga central y desatornilla el receptor RC. Luego vuelve a poner la viga, atornillando solo los dos tornillos de los extremos. Asegúrate de que quede asentada hasta el fondo sobre los pequeños postes de plástico.
Montaje de la Raspberry Pi y la cámara
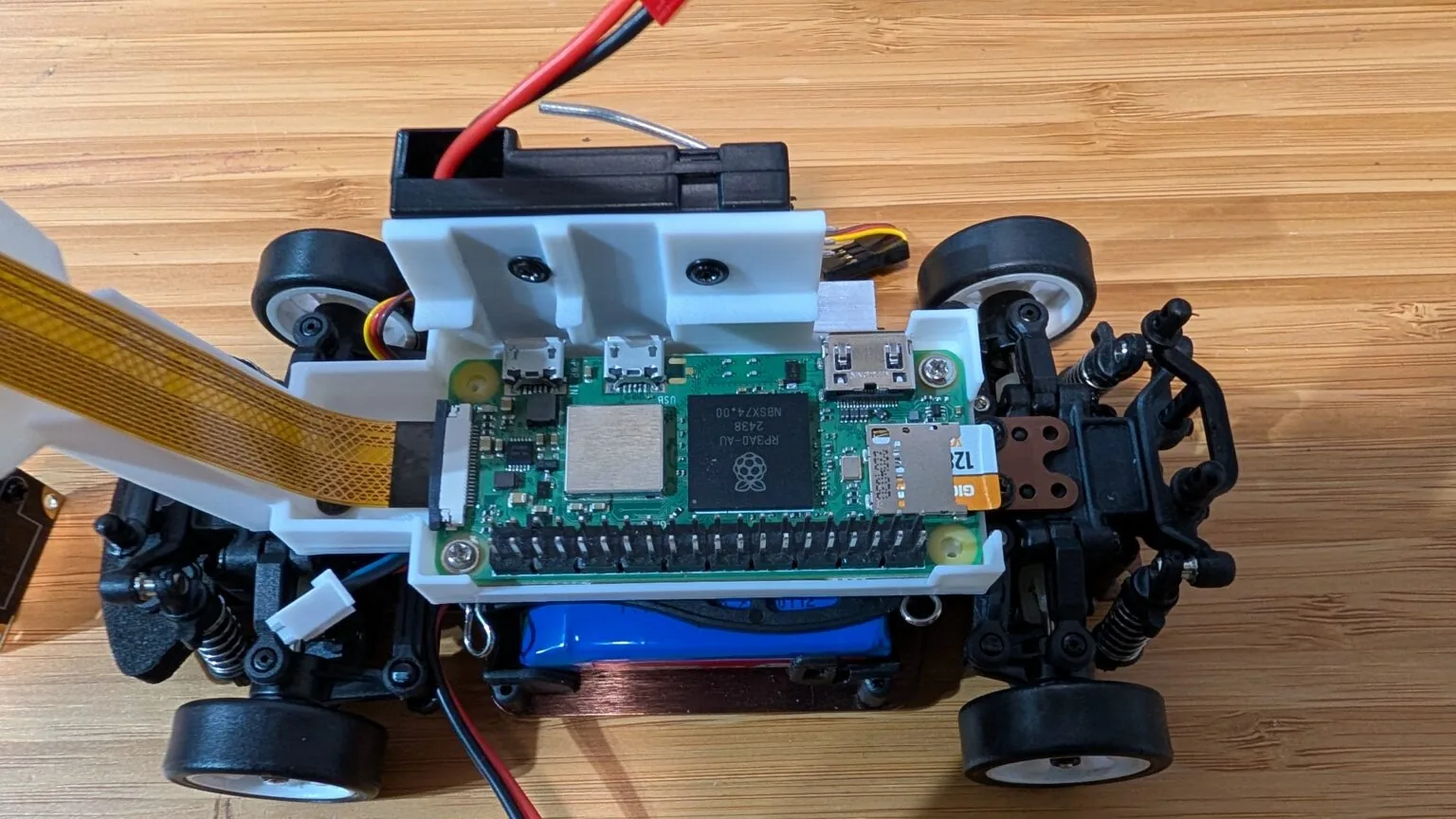
Atornilla el soporte de la Pi Zero usando los tornillos de viga que te sobraron, y fija el receptor RC con los tornillos cortos que antes lo sujetaban a la viga.
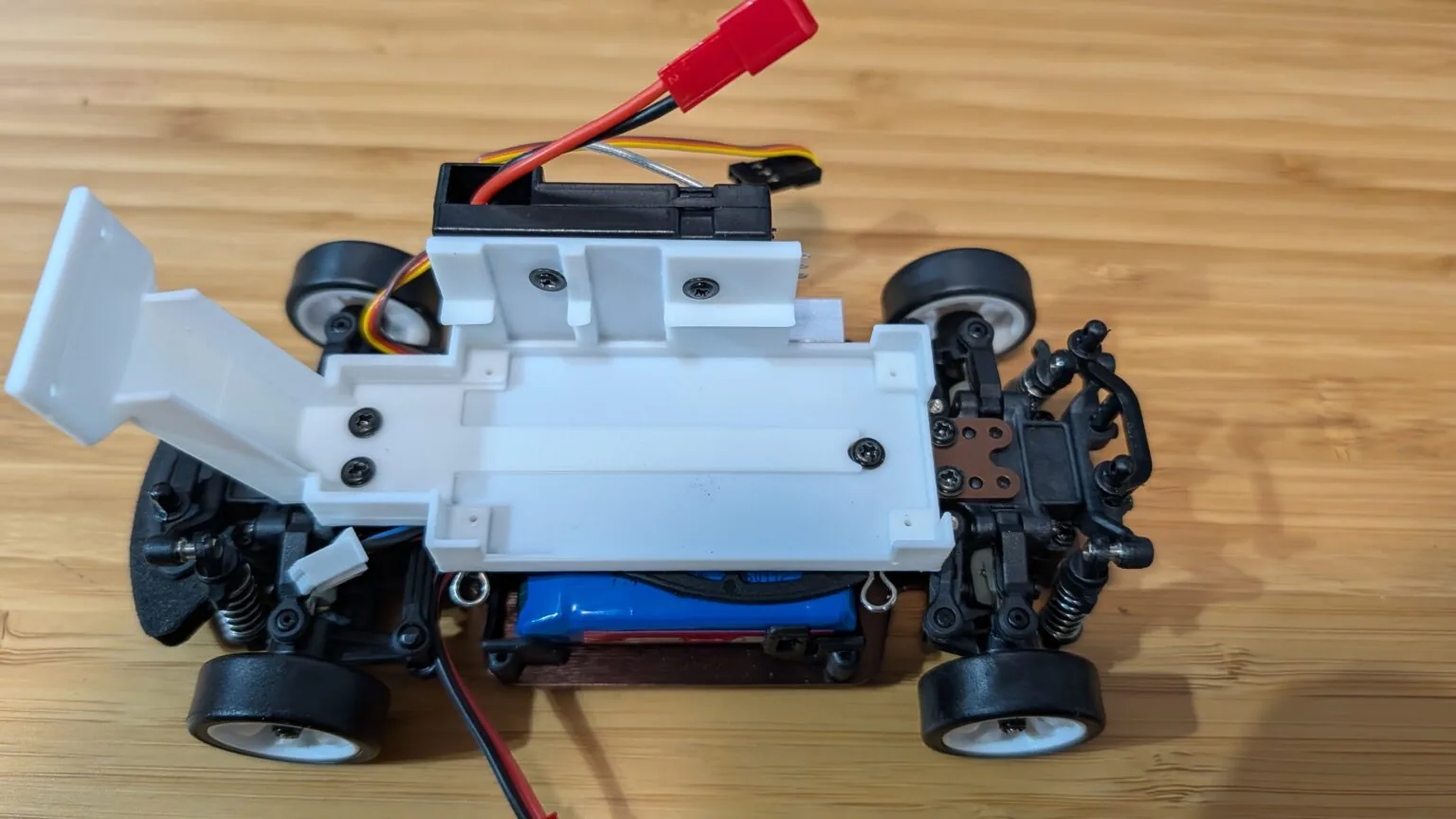
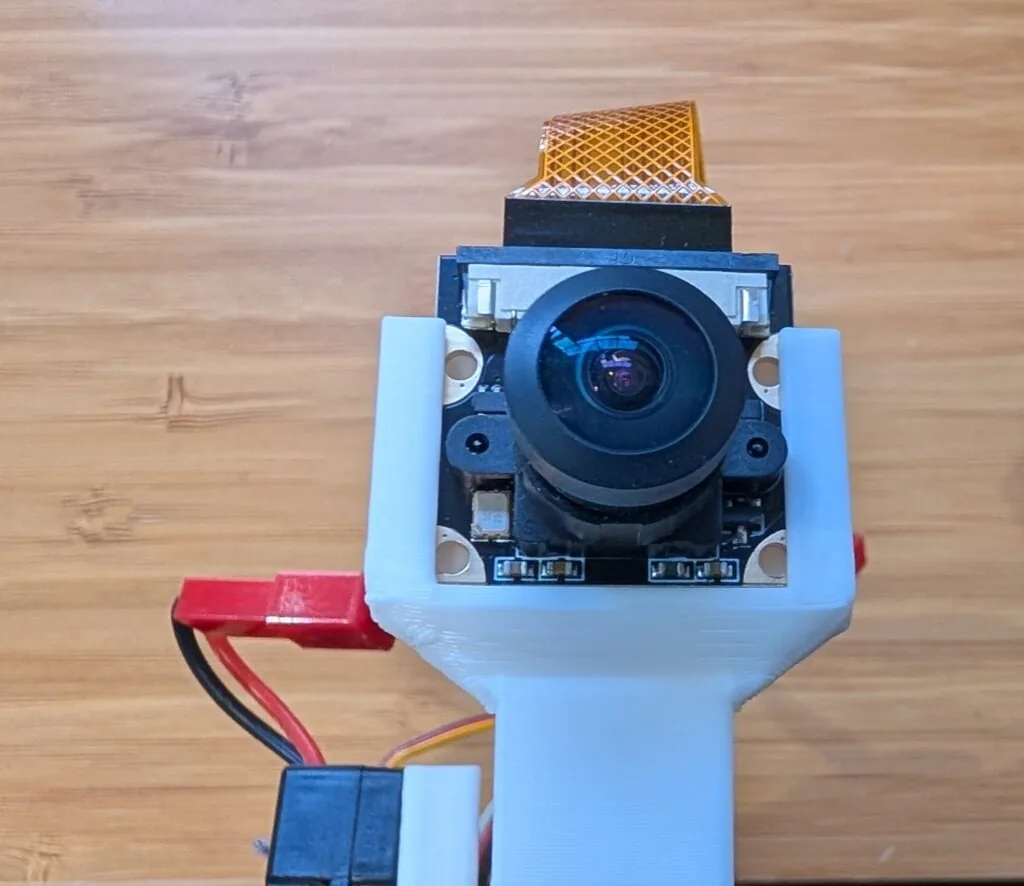
Monta la Pi Zero 2. Te basta con atornillarla con dos tornillos en diagonal, uno frente al otro. Por último, coloca la cámara en la ranura del soporte, con el cable hacia arriba.
Preparar la microSD con Raspberry Pi Imager
Para el software vamos a usar una versión optimizada de Donkeycar que corre mejor en la Raspberry Pi Zero 2, que no tiene tanta memoria ni cómputo como la Pi 5. Acá va el paso a paso para dejar lista la tarjeta.
Paso 1
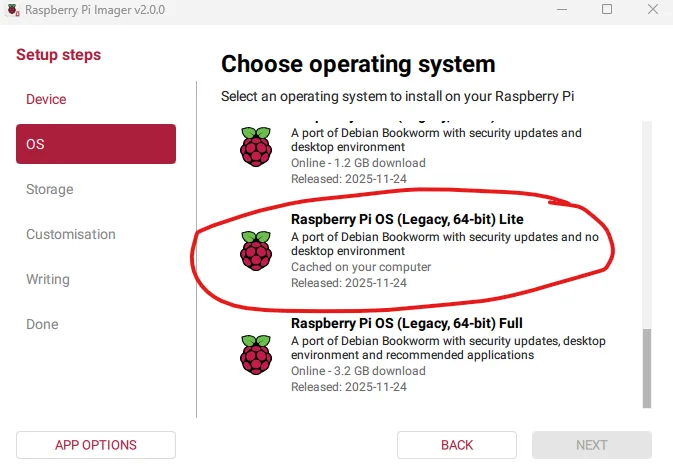
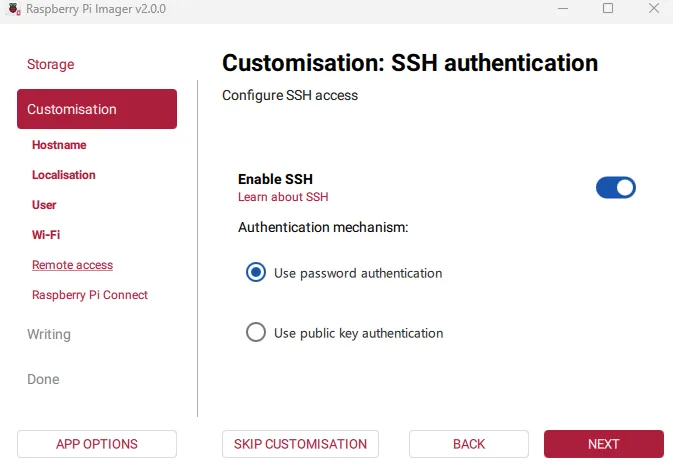
Con el Raspberry Pi Imager, selecciona la Pi Zero 2 W como destino y, para el sistema operativo, elige Bookworm Lite 64 bit (dentro de "Raspberry Pi OS (other)"). Completa el resto de las opciones, incluyendo el nombre que le quieras dar a la Pi ("donkeycar") y tu usuario, contraseña y datos de WiFi. Asegúrate de habilitar también el acceso SSH por contraseña. Después graba la imagen en la tarjeta.
Paso 2
Una vez que la microSD esté lista, insértala en la Pi Zero y enciéndela por el puerto USB. Cuando arranque (la luz verde deja de parpadear), lo que la primera vez tarda unos cinco minutos, conéctate por SSH desde una terminal en tu PC así:
ssh <your username>@donkeycar.local
Una vez adentro, actualiza el sistema de la forma habitual:
sudo apt-get update --allow-releaseinfo-change
sudo apt-get upgrade
Luego entra a raspi config (sudo raspi-config) y haz los siguientes cambios:
- En "Interface Options", habilita I2C y el puerto serie por hardware (di "No" a que el login shell sea accesible por serie, y "Yes" a que el hardware del puerto serie quede habilitado).
- En "Advanced Options" expande el filesystem.
Cuando termines, sal de la utilidad y reinicia. Al volver a iniciar sesión, escribe en la línea de comandos:
sudo nano /boot/firmware/config.txt
En ese archivo haz dos cambios: comenta dtoverlay=vc4-kms-v3d poniéndole un # adelante, y agrega esto al final del archivo: dtoverlay=disable-bt. Después guarda el archivo (ctrl o, ctrl x).
De vuelta en la línea de comandos, ingresa estos comandos:
sudo apt update
sudo systemctl disable hciuart
sudo apt install zram-tools
sudo systemctl enable --now zramswap.service
sudo reboot
Un detalle de ingeniería que vale la pena entender: deshabilitar el Bluetooth (disable-bt) y el servicio hciuart libera el puerto serie por hardware, que es justo el que el HAT necesita para hablar con el servo. Y activar ZRAM crea una swap comprimida en RAM, un truco clave en la Pi Zero 2: como tiene apenas 512 MB, comprimir páginas de memoria en lugar de escribirlas a la microSD evita que el sistema se ahogue al entrenar o al inferir.
Después de reiniciar, ingresa estos comandos adicionales, algunos de los cuales tardan unos minutos en completarse:
sudo apt update
sudo apt-get install build-essential python3 python3-dev python3-pip python3-virtualenv python3-numpy python3-picamera2 libcamera-apps python3-pandas python3-rpi.gpio i2c-tools avahi-utils joystick libopenjp2-7-dev libtiff5-dev gfortran libatlas-base-dev libopenblas-dev libhdf5-serial-dev libgeos-dev git ntp
python3 -m virtualenv -p python3 env --system-site-packages
echo "source ~/env/bin/activate" >> ~/.bashrc
source ~/.bashrc
mkdir projects
cd projects
git clone https://github.com/autorope/donkeycar
cd donkeycar
pip install -e .[pi]
Crear tu app de Donkeycar y manejar
Cuando todo eso esté listo, crea tu app de Donkeycar:
donkey createcar --path ~/mycar
Dentro de tu directorio mycar, puedes copiar un archivo de configuración ya armado, o usar el editor de config online para hacer el tuyo, siguiendo las instrucciones del HAT RC estándar.
Finalmente, después de pasar por la grabación normal de datos con Donkeycar y luego correr un modelo entrenado, cuando cambies a modo automático en la interfaz web, elige "Auto (S)teer".
Acá viene la decisión de diseño mas importante del proyecto. Como los autos escala 1:28 traen el receptor RC y el control de motor integrados, es demasiado difícil extraer la señal de acelerador para que la maneje Donkeycar (haría falta cortar pistas y soldar bastante). Por eso, con estos autos tú controlas el acelerador a mano, mientras la IA controla la dirección. En la práctica esto funciona muy bien para aprender visión artificial aplicada a conducción: la red neuronal aprende a mirar la pista por la cámara y decidir el ángulo de giro, que es la parte difícil, y tú te encargas de la velocidad.

Un detalle que no es tan obvio como debería: para encender el auto, después de enchufar la batería tienes que presionar este botón en el receptor RC, que enciende todo.
Variantes y mejoras
Una vez que tengas el auto andando, hay varias formas de subirle el nivel que el tutorial original no cubre:
- Entrena el modelo en tu PC, no en la Pi. La Pi Zero 2 puede grabar datos e inferir, pero entrenar la red ahi es lento. Copia las carpetas de datos a un PC con GPU, entrena con
donkey trainy vuelve a copiar solo el modelo.tflitea la Pi. El entrenamiento que en la Zero tarda horas, en una GPU modesta toma minutos. - Cambia a un modelo mas liviano para mejorar los FPS. Si notas que la inferencia va lenta, en el archivo de configuración puedes bajar la resolución de entrada de la cámara (por ejemplo de 160x120 a 120x90) o usar una arquitectura de red mas chica. Menos píxeles por cuadro significa mas cuadros por segundo, y en un auto que se mueve eso se traduce en reacciones mas rápidas.
- Agrega una pista con cinta de enmascarar. Para entrenar adentro, pega dos líneas de cinta en el piso formando un circuito ovalado. Es la forma mas barata de generar datos de entrenamiento consistentes, y como es escala 1:28, te cabe un circuito completo en el living.
Personalización para Chile
En Chile puedes conseguir las piezas electrónicas clave del proyecto en MechatronicStore:
- Módulo cámara para Raspberry Pi Rev 1.3 (SKU M-434) ~ $7.690 CLP. Es la cámara CSI que se conecta directo al conector de la Pi Zero, equivalente funcional a la cámara que usa el tutorial.
- Tarjeta microSD 8/32/64 GB Kingston clase 10 (SKU 23253) ~ $7.990 CLP. El tutorial recomienda 128GB, pero aclara que con 64GB andas perfecto.
Un par de honestidades para que no te lleves sorpresas:
- La Raspberry Pi Zero 2 W (SKU GS3-2) es el cerebro del proyecto y aparece en el catálogo, pero al momento de escribir esto figura sin stock. Conviene revisar su disponibilidad antes de comprar el resto, o buscar una alternativa de Pi Zero 2 W mientras tanto.
- El auto RC escala 1:28 y el Mini RC HAT son piezas especializadas de hobby RC que MechatronicStore no maneja. Para esas tendrás que recurrir a tiendas de modelismo RC o importarlas. Las dejamos igual en la lista de materiales para que veas el costo real completo del proyecto.
Recursos
- Tutorial original (inglés): Running Donkeycar on a 1:28 scale car, por zlite en DIY Robocars.
- Repositorio GitHub de Donkeycar: autorope/donkeycar
- Documentación oficial: Donkeycar docs
Versión chilena con componentes en stock local en MechatronicStore. Contenido inspirado en el tutorial de DIY Robocars, reescrito y ampliado por el equipo editorial.