

Mano Robot Biónica (Derecha)
$ 349.990 IVA incluido
El Brazo Robot Biónico consta de 5 micro-servo de metal y está construido de acrílico.
Posee un agarre de 500 g.
Puede ser controlado por un Arduino.
Alimentación requerida, 5[v] 2[A].
Cada dedo puede ser controlado de manera independiente.
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Sin existencias
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
No incluye el microcontrolador
Características técnicas
| Especificación | Valor |
| Voltaje de Operación | 4.8-6V |
| Señal de Control | 1.0ms~2.0ms (45~135°) |
| Corriente de Operación | 2A |
| Carga | 500g |
| Par del Servo | 2.4kg*cm (4.8v) 2.8kg*cm (6v) |
| Velocidad del Servo | 0.11 «/ 60 ° (4.8v) 0.09» / 60 ° (6.0 V) |
| Temperatura de Operación | 0 ~ 55 ℃ |
| Cable | Brown <-> GND Red <-> VCC Orange <-> Señal |
| Dimensiones del Servo | 23 * 12.2 * 29mm /0.91*0.48*1.14 pulgadas |
| Dimensiones de la Mano | 330 mm / 12.99 pulgadas (Altura) |
| Peso Neto del Servo | 14g |
| Peso Total | 916g (Kit completo) |
Conexiones
/*!
@file ROB0142.ino
@brief Bionic Robot Hand
@n [Get the module here]()
@n This example show 0-9 the 10 Numbers.
@n [Connection and Diagram]()
@copyright [DFRobot](https://www.dfrobot.com), 2017
@copyright GNU Lesser General Public License
@author: (ju.li@dfrobot.com)
@version V1.0
@date 2017-03-01
*/
#include <Servo.h>
Servo Saservo;
Servo Sbservo;
Servo Scservo;
Servo Sdservo;
Servo Seservo;
int Sa = 90; // default Position
int Sb = 50; //
int Sc = 40; //
int Sd = 50; //
int Se = 50; //
void setup()
{
Serial.begin(9600); //Serial Baudrate
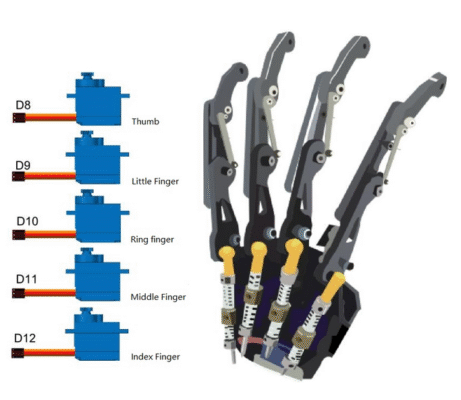
Saservo.attach(8); //thumb servo
Sbservo.attach(9); //little finger servo
Scservo.attach(10); //ring finger servo
Sdservo.attach(11); //middle finger servo
Seservo.attach(12); //index finger servo
Saservo.write(90); //thumb
Sbservo.write(50); //little finger
Scservo.write(40); //ring finger
Sdservo.write(50); //middle finger
Seservo.write(50); //index finger
delay(1000);
}
void loop()
{
char cc; //
while (Serial.available() > 0) //
{
cc = Serial.read(); //
if (cc == 'a') //
{
// spread the fingers
for (Sa = 90; Sa <= 160; Sa += 1) //thumb
{
Saservo.write(Sa);
delay(15);
}
for (Sb = 50; Sb <= 150; Sb += 1) //little finger
{
Sbservo.write(Sb);
delay(15);
}
for (Sc = 40; Sc <= 130; Sc += 1) //ring finger
{
Scservo.write(Sc);
delay(15);
}
for (Sd = 50; Sd <= 150; Sd += 1) //middle finger
{
Sdservo.write(Sd);
delay(15);
}
for (Se = 50; Se <= 140; Se += 1) //index finger
{
Seservo.write(Se);
delay(15);
}
delay(1000);
//close the fingers
for (Sa = 160; Sa >= 90; Sa -= 1)
{
Saservo.write(Sa);
delay(15);
}
for (Sb = 150; Sb >= 50; Sb -= 1)
{
Sbservo.write(Sb);
delay(15);
}
for (Sc = 130; Sc >= 40; Sc -= 1)
{
Scservo.write(Sc);
delay(15);
}
for (Sd = 150; Sd >= 50; Sd -= 1)
{
Sdservo.write(Sd);
delay(15);
}
for (Se = 140; Se >= 50; Se -= 1)
{
Seservo.write(Se);
delay(15);
}
}
//9
if (cc == '9')
{
Saservo.write(90);//thumb
Sbservo.write(50);//little finger
Scservo.write(40);//ring finger
Sdservo.write(50);//middle finger
Seservo.write(110);//index finger
}
//8
if (cc == '8')
{
Saservo.write(160);//thumb
Sbservo.write(50);//little finger
Scservo.write(40);//ring finger
Sdservo.write(50);//middle finger
Seservo.write(140);//index finger
}
//7
if (cc == '7')
{
Saservo.write(160);//thumb
Sbservo.write(50);//little finger
Scservo.write(40);//ring finger
Sdservo.write(150);//middle finger
Seservo.write(140);//index finger
}
//6
if (cc == '6')
{
Saservo.write(160);//thumb
Sbservo.write(150);//little finger
Scservo.write(40);//ring finger
Sdservo.write(50);//middle finger
Seservo.write(50);//index finger
}
//5
if (cc == '5')
{
Saservo.write(160);//thumb
Sbservo.write(150);//little finger
Scservo.write(130);//ring finger
Sdservo.write(150);//middle finger
Seservo.write(140);//index finger
}
//4
if (cc == '4')
{
Saservo.write(90);//thumb
Sbservo.write(150);//little finger
Scservo.write(130);//ring finger
Sdservo.write(150);//middle finger
Seservo.write(140);//index finger
}
//3
if (cc == '3')
{
Saservo.write(90);//thumb
Sbservo.write(50);//little finger
Scservo.write(130);//ring finger
Sdservo.write(150);//middle finger
Seservo.write(140);//index finger
}
//2
if (cc == '2')
{
Saservo.write(90);//thumb
Sbservo.write(50);//little finger
Scservo.write(40);//ring finger
Sdservo.write(150);//middle finger
Seservo.write(140);//index finger
}
//1
if (cc == '1')
{
Saservo.write(90);//thumb
Sbservo.write(50);//little finger
Scservo.write(40);//ring finger
Sdservo.write(50);//middle finger
Seservo.write(140);//index finger
}
//0
if (cc == '0')
{
Saservo.write(90);//thumb
Sbservo.write(50);//little finger
Scservo.write(40);//ring finger
Sdservo.write(50);//middle finger
Seservo.write(50);//index finger
}
}
Resultados Esperados
| Carácter | Acción |
|---|---|
| a | Abre todos los dedos y luego los cierra |
| 0 | Muestra el gesto «0» |
| 1 | Muestra el gesto «1» |
| 2 | Muestra el gesto «2» |
| 3 | Muestra el gesto «3» |
| 4 | Muestra el gesto «4» |
| 5 | Muestra el gesto «5» |
| 6 | Muestra el gesto «6» |
| 7 | Muestra el gesto «7» |
| 8 | Muestra el gesto «8» |
| 9 | Muestra el gesto «9» |
Preguntas Frecuentes
La especificación dice «Alimentación 5V 2A». ¿Puedo alimentar la mano desde el pin de 5V de mi Arduino?
No, y esta es la recomendación más importante para evitar dañar tu Arduino. El puerto USB y el regulador de voltaje de un Arduino solo pueden suministrar unos 500mA (0.5A). Intentar alimentar los 5 servomotores desde ahí provocará que el Arduino se reinicie constantemente o se queme. Debes utilizar una fuente de alimentación externa y dedicada de 5V que pueda proveer como mínimo 2 Amperios (2A). La tierra (GND) de esta fuente externa debe estar conectada a la tierra (GND) de tu Arduino.
¿La mano robótica viene ya ensamblada o es un kit para armar?
Este producto se entrega como un kit para armar (DIY). Recibirás todas las piezas de acrílico cortadas con precisión, los 5 servomotores, y la tornillería necesaria. El ensamblaje es una parte fundamental y muy educativa del proyecto, que te permitirá entender la mecánica de cada articulación. Se recomienda seguir un manual o video de ensamblaje paso a paso.
Además de lo que viene en el kit, ¿qué más necesito comprar para que funcione?
Para completar el proyecto y poner en marcha la mano robótica, necesitarás como mínimo:
- Un microcontrolador, como un Arduino UNO R3 (recomendado por el código de ejemplo).
- Una fuente de alimentación externa de 5V y 2A, como se mencionó anteriormente.
- Cables Jumper para conectar los pines de señal de los servos al Arduino.
Opcionalmente, un «Sensor Shield» para Arduino puede facilitar mucho las conexiones de los servos de forma ordenada.
¿Qué tipo de servomotores incluye? ¿Por qué se mencionan como «micro-servo de metal»?
El kit incluye 5 servomotores del tipo MG90S o un equivalente. La característica clave es que poseen engranajes metálicos en lugar de los engranajes de plástico del servo SG90 estándar. Esto es crucial para este proyecto, ya que los engranajes metálicos ofrecen una mayor durabilidad y un torque superior, permitiendo que los dedos ejerzan una fuerza de agarre considerable y resistan mejor el desgaste del uso continuo.
El código de ejemplo es para Arduino. ¿Puedo controlar la mano con un Raspberry Pi o un ESP32?
Sí, absolutamente. La mano es controlada por señales PWM estándar para servomotores, por lo que puedes usar cualquier microcontrolador o Single-Board Computer (SBC) que pueda generar estas señales. Esto incluye Raspberry Pi, ESP32, micro:bit, etc. Lo único que deberás hacer es adaptar la lógica del código de ejemplo al lenguaje y las librerías de la plataforma que elijas (por ejemplo, usando Python con la librería GPIO Zero en una Raspberry Pi).
¿Cómo conecto 5 servos a un Arduino UNO si tiene un número limitado de pines?
Un Arduino UNO tiene suficientes pines para controlar los 5 servos directamente. El código de ejemplo utiliza los pines 8, 9, 10, 11 y 12, todos los cuales son capaces de generar la señal PWM necesaria. La clave no es la cantidad de pines de señal, sino cómo distribuyes la alimentación. Como se indicó, la alimentación de 5V y GND para los servos debe venir de una fuente externa, no del Arduino.
La estructura es de acrílico. ¿Qué tan resistente es y qué precauciones debo tener?
El acrílico es un material excelente para este tipo de kits porque es ligero, rígido y permite ver la mecánica interna. Es muy resistente para su uso normal. La principal precaución es no apretar en exceso los tornillos durante el ensamblaje. El acrílico es más frágil que el metal o el plástico ABS, y un apriete excesivo podría fisurarlo. Aprieta los tornillos hasta que estén firmes, pero sin forzarlos.
Valoraciones (0)
Sé el primero en valorar “Mano Robot Biónica (Derecha)”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados





Valoraciones
No hay valoraciones aún.