Manual Brazo Robótico Acrílico con servomotores.
Manual de Ensamblaje: Kit Brazo Robot de Acrílico (4 Ejes)
Introducción
Este manual te guiará en el ensamblaje paso a paso del kit de brazo robot de acrílico. El kit incluye todas las piezas estructurales, tornillería y los 4 servomotores necesarios para su funcionamiento.
Importante: El kit no incluye un controlador (como un Arduino o similar), por lo que este manual se enfoca exclusivamente en el montaje mecánico del brazo.
Materiales Incluidos
Antes de comenzar, asegúrate de tener todos los siguientes componentes:
- 1x Tablilla de acrílico con todas las piezas precortadas.
- 4x Micro Servomotores SG90 con sus accesorios plásticos (horns).
- Tornillería:
- 9x Pernos M3 x 6mm
- 22x Pernos M3 x 8mm
- 7x Pernos M3 x 10mm
- 1x Perno M3 x 12mm
- 4x Pernos M3 x 20mm
- 16x Tuercas M3
Ensamblaje del Brazo Robótico
Sigue los pasos en orden, utilizando las imágenes como referencia para cada etapa.
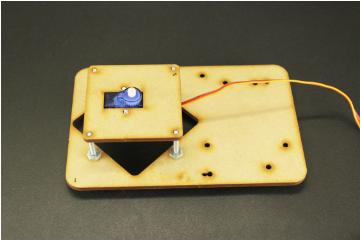
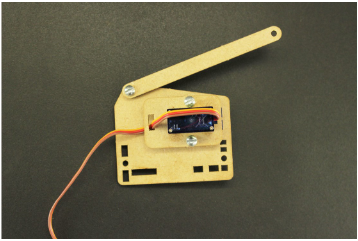
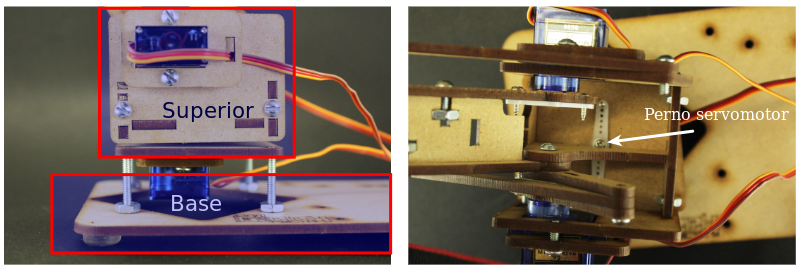
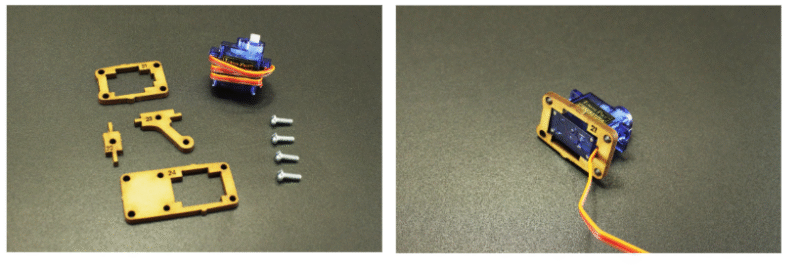
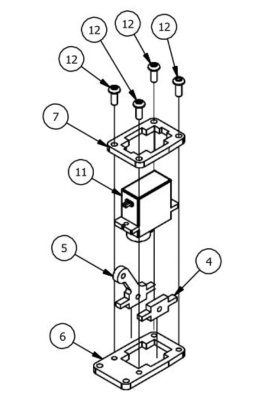
Paso 1: Montaje de la Base Giratoria
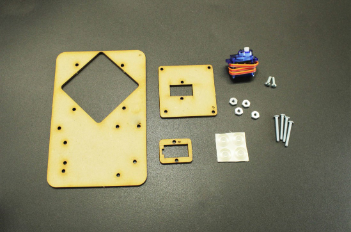
- Componentes: base circular, 1 collar para servo, 1 montaje de servo, 1 servomotor SG90, 4 espaciadores plásticos y 4 pernos M3 x 20mm.

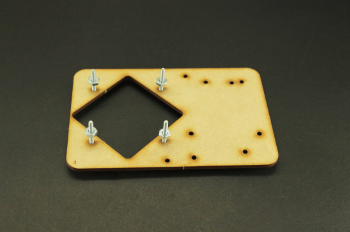
- Inserta los 4 pernos M3 x 20mm en la base circular y asegúralos por el otro lado con los 4 espaciadores plásticos.
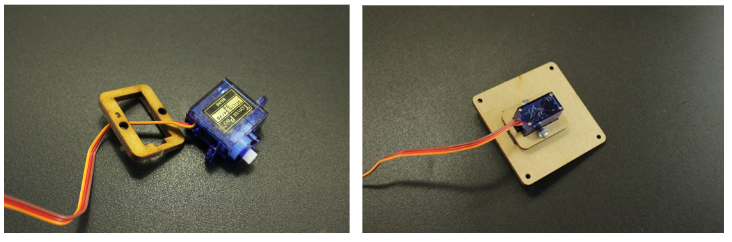
- Pasa el cable del servomotor a través del collar de acrílico y luego fija el servo al montaje de acrílico usando dos tornillos cortos. El conjunto debería verse como en la imagen.
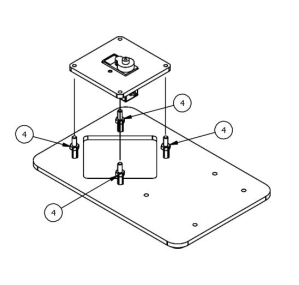
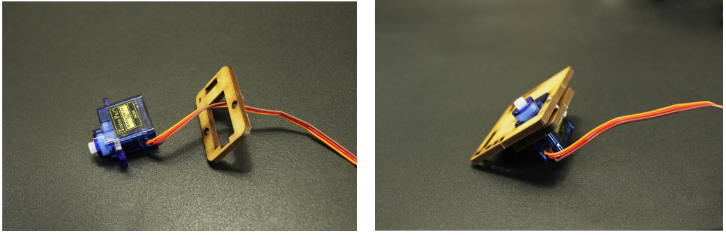
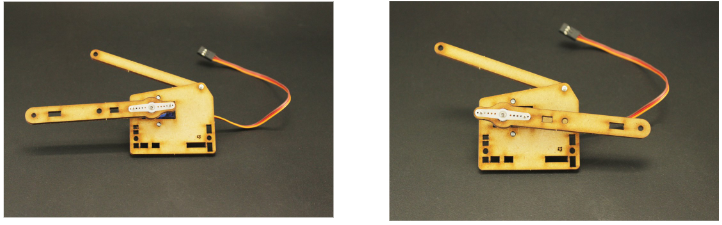
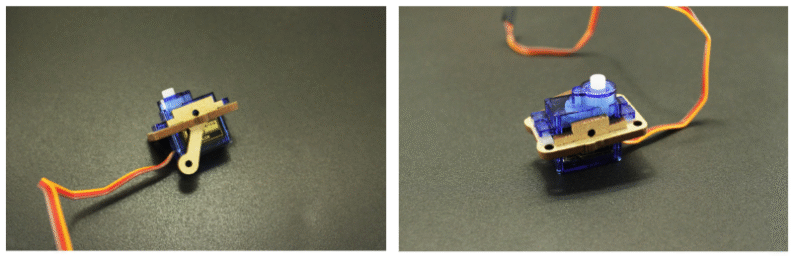
Paso 2: Unión del Servo a la Base
- Ahora, ensambla el conjunto del servomotor del paso anterior a la base circular.
- Utiliza los pernos y espaciadores que ya instalaste en la base para fijar el montaje del servo. El resultado final debe coincidir con las siguientes imágenes.
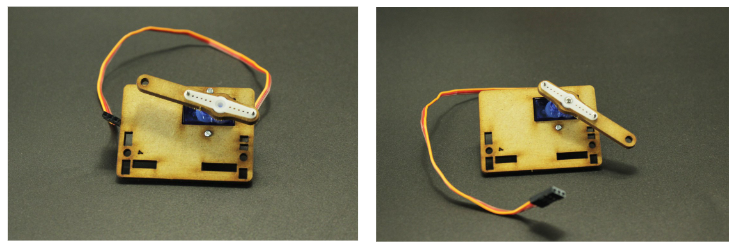
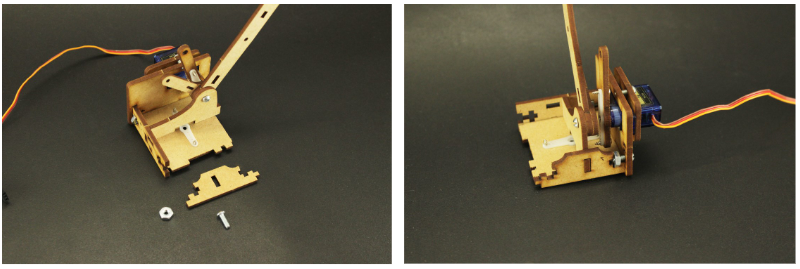
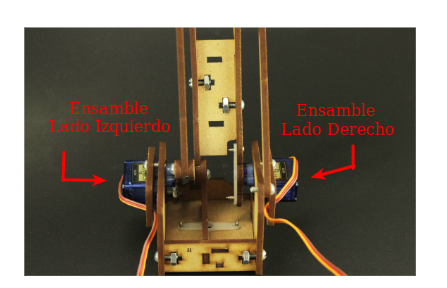
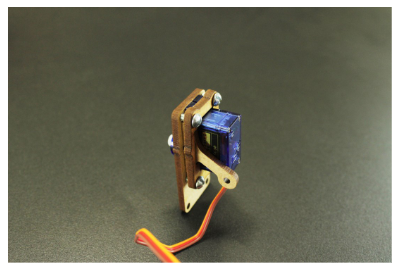
Paso 3: Construcción de los Laterales del Brazo
3.1. Lado Izquierdo
- Componentes: pieza lateral izquierda, 1 servomotor, 1 collar para servo, 1 brazo de acrílico para el servo y tornillería.
- Coloca el collar en el servo, pasando el cable por la ranura. Luego, monta el servo en la pieza lateral y asegúralo con dos tornillos cortos.
- Ajuste del servo: Monta la pieza de acrílico sobre el eje del servomotor sin atornillarla todavía. Gira el servo manualmente hasta uno de sus topes. Una vez en el tope, atornilla la pieza de acrílico en la posición que se muestra en la figura. Esto asegura el rango de movimiento correcto.
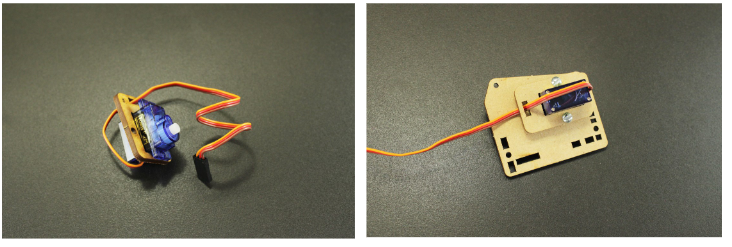
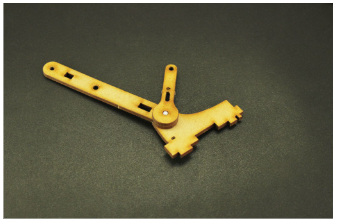
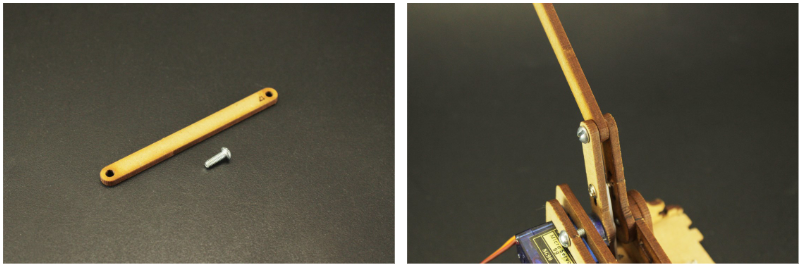
3.2. Lado Derecho
- Componentes: pieza lateral derecha, 1 servomotor, 1 collar para servo, 1 eslabón corto y tornillería.
- De forma similar al lado izquierdo, fija el servo al collar y luego a la pieza lateral derecha.
- En el orificio libre de la pieza lateral, ensambla el eslabón corto con un perno, como se ve en la imagen.
- Realiza el mismo proceso de ajuste que en el lado izquierdo: monta la pieza de acrílico en el eje del servo, gíralo hasta su tope y atorníllala en la posición correcta.
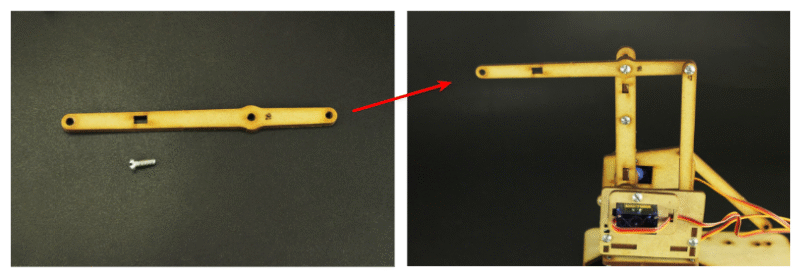
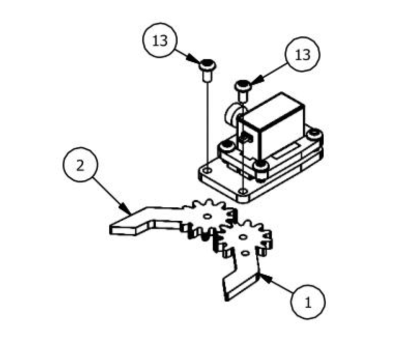
Paso 4: Ensamblaje de Eslabones y Soportes
Continuaremos preparando las piezas que conectarán ambos lados del brazo.
- Toma las piezas que se muestran en la imagen y únelas con un perno corto.
- El resultado debe ser como en la siguiente figura, con el perno insertado desde abajo.
- Utilizando el lado izquierdo como base, ensambla la pieza rectangular con el accesorio de servo, como se observa en la figura.

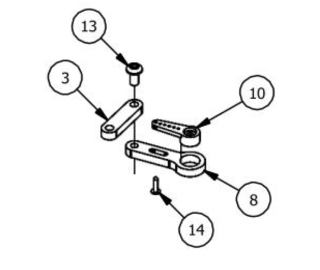
- Ensambla las piezas centrales con un perno y una tuerca, que servirán para fijarlas a la base del lado izquierdo.
- Toma el eslabón largo y únelo con un tornillo como se muestra.
- Utilizando la pieza de la izquierda, ensámblala como se ve a la derecha con un perno y tuerca.


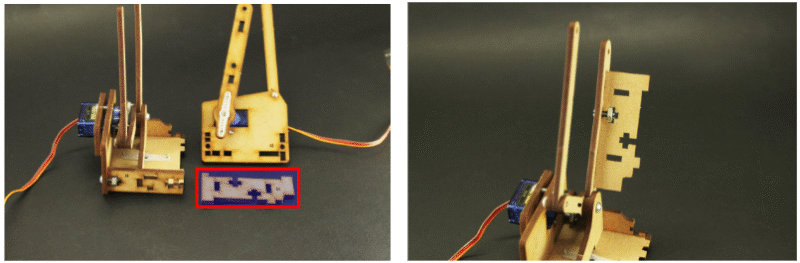
Paso 5: Unión de los Laterales del Brazo
- Une los lados izquierdo y derecho que ensamblaste previamente. Utiliza dos pernos y dos tuercas para conectar las piezas superiores.
- El resultado debe ser un único cuerpo principal del brazo, como se ve en la imagen.
Paso 6: Montaje del Brazo sobre la Base
- Ahora une el cuerpo principal del brazo a la base giratoria del Paso 2.
- El perno del servomotor de la base debe encajar en el orificio central de la estructura principal, como indica la imagen.
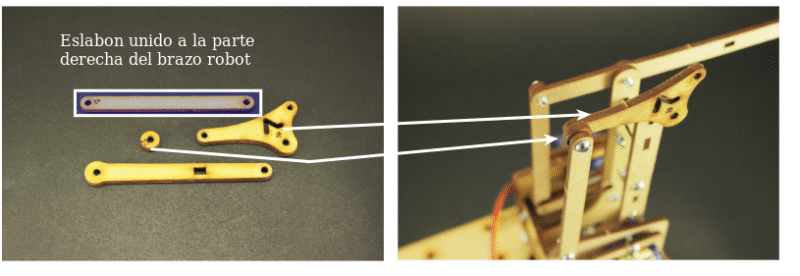
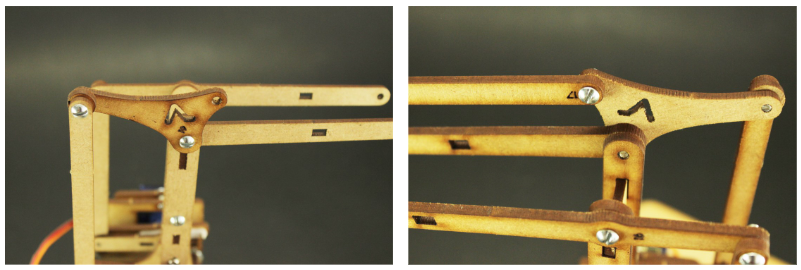
Paso 7: Conexión de Eslabones de Movimiento
- Añade el eslabón que se muestra en la figura, conectándolo a los extremos de los eslabones previamente ensamblados en cada lado. Usa pernos para fijarlo.
- Al eslabón del lado derecho (marcado en el rectángulo), acopla las dos piezas indicadas por la flecha.
- Une dos eslabones más a la pieza anterior. Uno de ellos (el que tiene un rectángulo) se conecta entre la parte central del brazo y la pieza anterior. El otro eslabón se conecta solo a la pieza anterior.
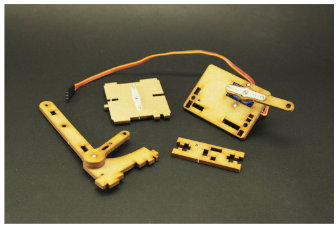
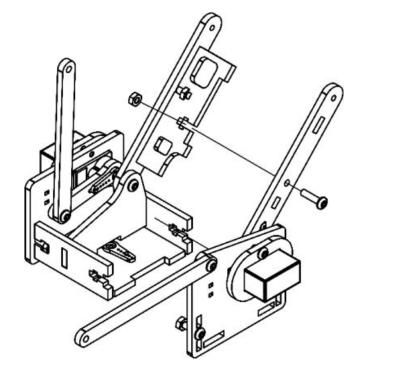
Paso 8: Ensamblaje de la Pinza (Gripper)
- Componentes: las piezas restantes, el último servomotor y tornillería.
- Pasa el cable del servo por su collar y móntalo en la pieza principal de la pinza.
- Coloca las piezas pequeñas a los costados del servomotor. La otra pieza se une con pernos, como se muestra.
- Ensambla las «garras» de la pinza. La numeración en la imagen (
12y13) indica el uso de pernos de 6mm y 8mm respectivamente. Sigue la secuencia de la imagen.
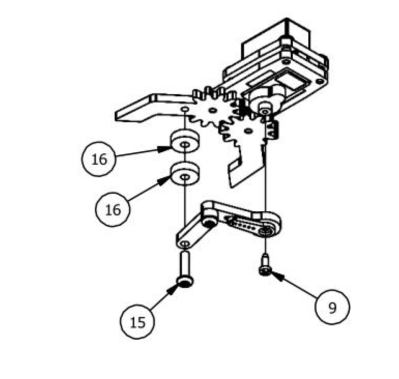
- Para el mecanismo de apertura y cierre, ensambla primero el conjunto de dos eslabones pequeños y luego únelo a la pinza y al accesorio del servo.
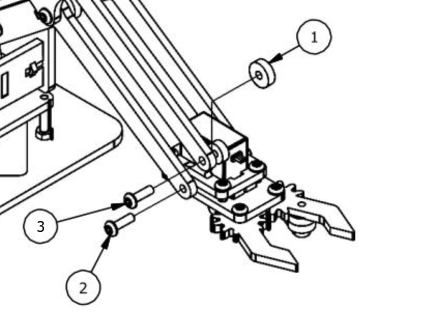
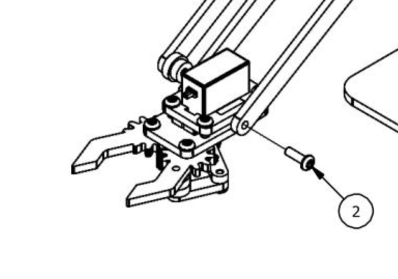
Paso 9: Montaje Final
- Finalmente, con los pernos restantes, ensambla la pinza completa al extremo del brazo.
¡Felicidades! 🎉 Has completado el ensamblaje mecánico de tu brazo robótico. Ahora está listo para ser conectado a un controlador y ser programado.
