Auto Robot evita obstáculos con Arduino, Sensor Ultrasónico y Driver L298N

Introducción:
En el presente tutorial se enseñara como un Auto robot puede esquivar obstáculos o al menos no chocar con estos mediante el uso de Sensor Ultrasónico.
Virtudes del Driver L298N
Es una placa que incorpora todos los componentes necesarios para usar el integrado L298 con un Arduino, una Raspberry, entre otros microcontroladores. Entre sus principales características se encuentran:
- Alimentación desde 5V hasta 30 V (dependiendo de la configuración elegida con un Jumper).
- Corriente DC máxima total peak de 3,5
- Protección en caso de sobre-temperatura.
- Bajo voltaje de saturación.
- Diodos en cada canal para proteger el circuito de corrientes externas (girar el motor con la mano puede «introducir» corriente al circuito y quemarlo).
- Regulador de 5V integrado.
- Capacidad de controlar la velocidad de cada motor mediante PWM.
Puente H de L298 ¿Qué es y qué nos permite realizar?
El puente H del L298 es un circuito que nos permite controlar la dirección del flujo de corriente a través de un motor, permitiéndonos controlar también la dirección de giro de este. Puede visualizarlo como un grupo de cuatro interruptores, como en la ilustración siguiente:
 con Arduino MechatronicStore")
Cerrando unos interruptores u otros, la corriente fluirá en una dirección o en otra a través del motor, lo que hará que gire en un sentido o en el contrario:
 con Arduino MechatronicStore")
Hoy en día, la mayoría de puentes H actuales se pueden comprar como circuito integrado, donde los interruptores son transistores. Nos ofrecen la posibilidad de controlar una potencia grande en el motor mediante señales de control de una potencia mucho más reducida.
IMPORTANTE: El sentido de giro de los motores dependerán de como se les ha conectado. Recordemos que si conectamos el motor DC en un sentido girará en una dirección y si lo conectamos al revés girará en sentido opuesto. Debemos encontrar que configuración es la que requerimos para el proyecto que estemos realizando.
Así pues, en resumen, los puentes H son componentes que nos ofrecen las siguientes posibilidades:
- Habilidad para invertir el sentido de giro de un motor
- Habilidad para utilizar una fuente de alimentación de mayor frecuencia para el motor que para la lógica (normalmente el Arduino que controla el circuito)
- Habilidad para controlar la potencia del motor (siempre que tenga una entrada «enable»).
Enable: El pin de «Enable» en el L298N permite controlar la velocidad de los motores mediante la variación de la señal de ancho de pulso (PWM) aplicada a este pin (Ya sea EnA o EnB según corresponda). Cuando el pin de «Enable» recibe una señal de PWM, el módulo habilita la salida de energía a los motores, y la velocidad de los motores se controla ajustando el ciclo de trabajo del PWM, desde el valor 0 a 255 debido a que Arduino para esto trabaja con 8 bits. En caso que este Pin tenga un Jumper puesto la velocidad siempre será la máxima, por el contrario, si no tiene un Jumper puesto, y también, no está conectado a algún pin, los motores no van a funcionar.
Freno Rápido: El «freno rápido» es un estado donde ambas mitades del puente H están activadas, creando una conexión directa entre el motor y el voltaje de alimentación. Esto puede hacer que el motor sea difícil de girar y actúe como una especie de freno. En realidad, se podría considerar como un estado de frenado, ya que al activar ambas mitades del puente H, se crea una resistencia eléctrica significativa en el circuito del motor, lo que puede detener rápidamente el movimiento del motor. Sin embargo, la terminología puede variar y algunos podrían referirse a este estado como «freno» mientras que otros podrían preferir términos como «bloqueo» o «parada rápida». De todas formas, el término «freno rápido» puede no ser el más preciso, y en lugar de eso, podríamos describirlo como un estado de frenado o bloqueo. La clave aquí es que al tener todos los pines en HIGH (todos los interruptores cerrados), se están activando ambas mitades del puente H, creando una resistencia eléctrica en el circuito del motor y, por lo tanto, deteniendo rápidamente su movimiento.
Pinout del Driver L298N y Sensor Ultrasónico HC-SR04


Sensor Ultrasónico
Un sensor de distancia ultrasónico HC-SR04 consta de dos transductores ultrasónicos, uno actúa como un transmisor que convierte la señal eléctrica en pulsos de sonido ultrasónico de 40 KHz. El otro actúa como receptor y escucha los pulsos transmitidos. Cuando el receptor recibe estos pulsos, produce un pulso de salida cuyo ancho es proporcional a la distancia del objeto en frente.
Qué es Ultrasonido?
El ultrasonido es una onda de sonido de tono alto cuya frecuencia excede el rango audible del oído humano.
Los humanos pueden escuchar ondas de sonido que vibran en un rango de aproximadamente 20 veces por segundo (un ruido sordo profundo) a 20,000 veces por segundo (un silbido agudo). Sin embargo, el ultrasonido tiene una frecuencia de más de 20 000 Hz y, por lo tanto, es inaudible para los humanos.
Auto Robot:
A continuación solo se enseñará el armado de el Auto Robot, Smart Car 4WD,, antes de armarlo completamente compruebe la polarización de los motores y que todos vayan en el mismo sentido, debido a que si alguno de ellos posee una polarización que lo hace «arrancar» en sentido opuesto al resto de motores puede ser un dilema a la hora de verificar el funcionamiento, si desea comprobar el funcionamiento mediante códigos y explicación de conexiones, puede ver el tutorial sobre esto, que tenemos en nuestra página web, pinche aquí.
Materiales para el armado:
Estos son los materiales que vienen para armar el Auto robot, seguramente al igual que en nuestro caso le faltarán tuercas (M4 Nut), ya que trae 8 y utiliza 8 al colocar los motores usando los tornillos largos (Paso 3) y utiliza 6 al momento de ensamblar la segunda parte del Auto, parte superior (Base Plate sobre los motores tras ser ensamblados, Paso 5).

Paso 1:

Paso 2:

Paso 3:

Paso 4:

Paso 5:

Resultado:

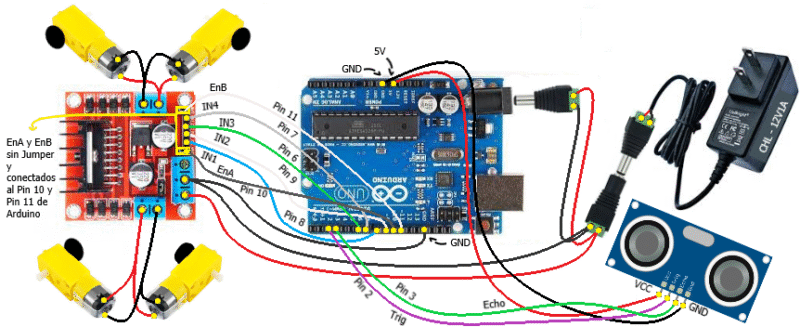
Conexión:
La conexión muestra nuestro circuito y armado, si usted no desea controlar la velocidad de los motores, NO CONECTE EnA y EnB, en lugar de esto ponga un Jumper en estos pines y en el código quite todo lo relacionado con el pin 10 y 11.
Código:
Mediante este código, propuesto como un prototipo, se puede comprobar el funcionamiento del auto evasor de obstáculos este solo gira en sentido horario, pero cumple la función principal de evitar obstáculos, antes de ponerlo a prueba verifique las conexiones, tanto del Arduino, Sensor y Driver, la polarización de motores, continuidad de los cables, etc.
Descargar Prototipo_Auto_evasor
Conclusión:
