

kit Robot oruga Tanque DIY con Motores
El precio original era: $ 20.990.$ 14.990El precio actual es: $ 14.990. IVA incluido
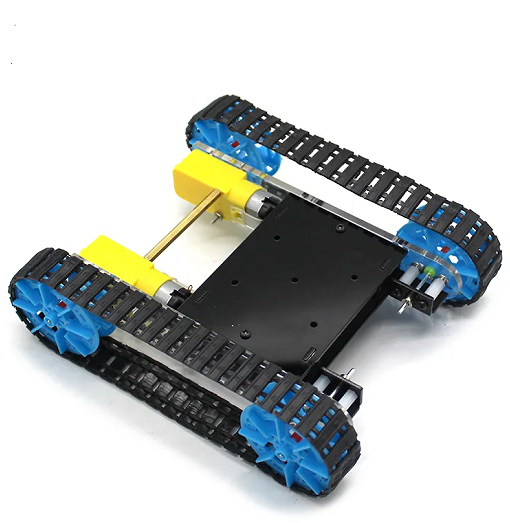
El Base Robot Tanque DIY es un modelo montable ideal para proyectos de robótica y aprendizaje. Equipado con dos motores tipo TT y motoreductores, ofrece un rendimiento eficiente en terrenos variados. Compatible con cualquier control remoto (no incluido), su diseño modular permite un ensamblaje fácil y personalización.
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Hay existencias
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
La Base Robot Tanque DIY es el modelo perfecto para quienes buscan crear sus propios robots personalizados. Este tanque motorizado tiene un diseño que facilita su ensamblaje, y es compatible con cualquier tipo de control remoto, lo que le da flexibilidad a tu proyecto. Además, cuenta con dos motorreductores que permitirán utilizarlo en distintos tipos de terreno.
Su estructura robusta y duradera hace que sea perfecto para personalizaciones, ya sea añadiendo sensores, cámaras o sistemas de control avanzados.
Con el Base Robot Tanque DIY, no solo aprenderás sobre electrónica, sino que también tendrás la oportunidad de experimentar con diferentes configuraciones de control, adaptándolo a tus necesidades.

Preguntas Frecuentes
Este kit es «DIY (Para armar tú mismo)». ¿Qué componentes principales incluye el kit y qué habilidades o herramientas adicionales necesitaré para ensamblar completamente la base del robot tanque?
Este kit de «Base Robot Tanque DIY» está diseñado como un modelo montable e incluye los componentes estructurales y de tracción básicos:
- Chasis Principal: Las piezas que forman el cuerpo o la estructura base del tanque.
- Orugas (Tracks): Las bandas flexibles que proporcionan la tracción tipo tanque.
- Ruedas Dentadas (Sprockets) y Ruedas de Apoyo (Idlers/Rollers): Para guiar y mover las orugas.
- Dos Motores DC tipo TT con Motoreductores: Estos son los motores que impulsarán las orugas. Los motoreductores ya vienen acoplados para proporcionar el torque necesario.
- Tornillería y Ejes: Los elementos de fijación necesarios para unir todas las partes mecánicas.
Habilidades y Herramientas Adicionales Necesarias:
- Ensamblaje Mecánico: Habilidad para seguir instrucciones de montaje (si se proporcionan) o interpretar cómo encajan las piezas. Destreza manual para atornillar piezas pequeñas.
- Herramientas Básicas: Destornilladores pequeños (Phillips o planos, según la tornillería), posiblemente pinzas o alicates pequeños.
- Electrónica (para control, no incluido): Para hacerlo funcional, necesitarás un microcontrolador (como Arduino), un driver de motor (ej. L298N o TB6612FNG para los dos motores TT), una fuente de alimentación (baterías), y posiblemente cables y una protoboard para las conexiones. Estos componentes de control y alimentación no están incluidos en el kit base del chasis.
El «diseño modular permite un ensamblaje fácil», pero se requiere paciencia y atención al detalle.
El kit incluye «dos motores tipo TT y motoreductores». ¿Cuáles son las especificaciones típicas de voltaje y RPM de estos motores, y qué tipo de driver de motor es compatible para controlarlos con un microcontrolador (ej. Arduino)?
Los motores «tipo TT» son muy comunes en kits de robótica y generalmente tienen las siguientes características (aunque pueden variar ligeramente):
- Voltaje de Operación: Típicamente operan en un rango de 3V a 6V DC. Algunos pueden llegar a 9V o 12V, pero es menos común para los modelos estándar amarillos. Es importante verificar si el kit especifica el voltaje de los motores incluidos.
- RPM (con reductora): La velocidad de salida con la caja reductora puede variar considerablemente según la relación de engranajes interna (ej. 1:48, 1:120). Podría estar en el rango de 100 a 250 RPM a 6V, pero esto es solo una estimación.
- Corriente: A 6V, sin carga, pueden consumir alrededor de 150-200mA, y bajo carga o al arrancar (stall current), pueden consumir significativamente más (hasta 1A o más por motor momentáneamente).
Driver de Motor Compatible:
Para controlar dos motores DC tipo TT con un microcontrolador como Arduino, necesitarás un driver de motor capaz de manejar la corriente de ambos motores y permitir el control de dirección y velocidad (PWM). Opciones populares incluyen:
- L298N (Módulo Driver): Puede controlar dos motores DC independientemente. Es robusto y común, aunque tiene una caída de voltaje.
- TB6612FNG (Módulo Driver): Más eficiente (menor caída de voltaje) que el L298N y también puede controlar dos motores DC.
- DRV8833 (Módulo Driver): Bueno para motores de bajo voltaje y también puede controlar dos motores.
Estos drivers se conectan a los pines de salida digital y PWM del microcontrolador.
¿Qué ventajas ofrece la tracción por orugas de este robot tanque para moverse en «terrenos variados» en comparación con un robot con ruedas tradicionales?
La tracción por orugas (tracks) ofrece varias ventajas para la movilidad en diferentes tipos de terreno:
- Mayor Superficie de Contacto: Las orugas distribuyen el peso del robot sobre un área más grande en comparación con las ruedas. Esto reduce la presión sobre el suelo, permitiendo que el robot se mueva más fácilmente sobre superficies blandas como arena, tierra suelta, o alfombras gruesas sin hundirse tanto.
- Mejor Tracción en Superficies Irregulares: Las orugas pueden adaptarse mejor a pequeñas irregularidades del terreno, manteniendo un buen contacto y agarre donde las ruedas podrían patinar o perder tracción. Pueden superar pequeños obstáculos más fácilmente.
- Capacidad para Subir Pendientes (limitada): Aunque depende del diseño de la oruga y la potencia del motor, la mayor área de contacto puede ayudar en la tracción al subir pendientes moderadas.
- Estabilidad: La base ancha proporcionada por las orugas puede ofrecer una buena estabilidad al robot.
Estas características hacen que un chasis tipo tanque sea adecuado para «un rendimiento eficiente en terrenos variados», aunque los giros pueden ser menos suaves o requerir más energía (giro por deslizamiento de las orugas) en comparación con algunos sistemas de ruedas.
El kit es «compatible con cualquier control remoto (no incluido)». ¿Qué tipo de electrónica de control (microcontrolador, receptor RC, driver de motor) necesitaría añadir para implementar un control remoto inalámbrico?
Para implementar un control remoto inalámbrico, necesitarás añadir varios componentes electrónicos que no vienen con el kit del chasis:
- Microcontrolador: Una placa como Arduino (Uno, Nano), ESP32, o Raspberry Pi Pico para procesar las señales del receptor y controlar los motores.
- Driver de Motor: Como se mencionó (ej. L298N, TB6612FNG), para que el microcontrolador pueda controlar la velocidad y dirección de los dos motores DC del tanque.
- Receptor Inalámbrico: Dependiendo del tipo de control remoto que quieras usar:
- Receptor RC (Radio Control): Si usas un transmisor y receptor RC estándar de modelismo (ej. 2.4GHz), el receptor se conectará a los pines de entrada del microcontrolador para leer las señales de los canales (joysticks).
- Módulo Bluetooth: Un módulo como el HC-05 o HC-06 para controlarlo desde un smartphone o computador vía Bluetooth.
- Módulo WiFi (si usas un ESP32 o ESP8266 como controlador principal): Para controlarlo a través de una red WiFi desde una app o interfaz web.
- Módulo NRF24L01+ u otro Transceptor de RF: Para una comunicación inalámbrica personalizada con otro microcontrolador que actúe como transmisor.
- Fuente de Alimentación: Baterías para alimentar el microcontrolador, el driver de motor y los motores.
La frase «compatible con cualquier control remoto» significa que la plataforma mecánica del chasis es versátil y puede ser adaptada para ser controlada por diferentes sistemas electrónicos que el usuario elija e integre.
¿La «estructura robusta y duradera» del chasis permite añadir componentes adicionales como sensores, cámaras o brazos robóticos pequeños? ¿Hay espacio o puntos de montaje previstos?
Si bien la descripción menciona una «estructura robusta y duradera» y que es «perfecto para personalizaciones, ya sea añadiendo sensores, cámaras o sistemas de control avanzados», la página del producto no muestra explícitamente puntos de montaje específicos o un área de carga superior muy detallada.
Generalmente, los chasis de este tipo:
- Ofrecen una Plataforma Base: La parte superior del chasis suele proporcionar una superficie plana donde se pueden montar componentes.
- Material Modificable: Si el chasis es de plástico (como muchos kits DIY), es relativamente fácil perforar agujeros adicionales para montar sensores, soportes para cámaras, o pequeñas placas de prototipado.
- Espacio para Electrónica: Suele haber espacio entre las orugas o sobre la plataforma principal para alojar la batería, el microcontrolador, y el driver de motor.
Para añadir componentes más pesados como un brazo robótico, incluso uno pequeño, deberás considerar:
- El Centro de Gravedad: Para evitar que el robot se vuelque.
- La Capacidad de Carga de los Motores: Los motores TT tienen un torque limitado. Un peso adicional significativo afectará la velocidad y la capacidad de movimiento.
- La Rigidez del Chasis: La robustez mencionada es probablemente para soportar su propio peso y el de la electrónica de control básica. Añadir cargas pesadas podría requerir refuerzos adicionales.
Es una buena base para «experimentar con diferentes configuraciones», pero la integración de componentes pesados o voluminosos requerirá planificación.
¿Qué habilidades de ensamblaje y conocimientos básicos de electrónica y programación se recomiendan para un estudiante o aficionado que quiera completar un proyecto funcional con esta base de robot tanque?
Para completar un proyecto funcional con esta base de robot tanque, se recomiendan las siguientes habilidades y conocimientos:
- Ensamblaje Mecánico: Paciencia y habilidad para seguir instrucciones de montaje (si las hay) o para ensamblar las piezas mecánicas del chasis, las orugas y los motores. Manejo de destornilladores y posiblemente otras herramientas manuales pequeñas.
- Conceptos Básicos de Electrónica:
- Entender cómo alimentar los motores (voltaje, corriente).
- Saber cómo funciona un driver de motor (H-Bridge) y cómo conectarlo a los motores y a un microcontrolador.
- Conceptos de polaridad, VCC, GND.
- Cómo alimentar el microcontrolador y otros sensores/módulos.
- Cableado y Prototipado: Habilidad para realizar conexiones seguras entre componentes usando cables de puente, protoboards, o soldadura si se desea una conexión más permanente (aunque muchos kits se pueden ensamblar sin soldadura inicialmente).
- Programación de Microcontroladores: Conocimientos básicos de programación en un lenguaje como C/C++ (para Arduino IDE), MicroPython, o el que sea compatible con el microcontrolador elegido. Esto incluye cómo configurar pines como salidas, generar señales PWM para control de velocidad, y leer entradas de sensores o receptores de control remoto.
- Resolución de Problemas (Debugging): Habilidad para identificar y solucionar problemas tanto en el hardware (conexiones incorrectas, problemas de alimentación) como en el software (errores de lógica en el código).
Este kit es una excelente plataforma para «aprender sobre electrónica» y robótica, pero el ensamblaje del chasis es solo el primer paso.
Considerando que es un kit DIY, ¿vienen los motores ya soldados a cables o necesitaré soldar los terminales de los motores TT a los cables que irán al driver?
La descripción del producto no especifica si los motores TT vienen con cables pre-soldados. Sin embargo, es muy común que los motores TT estándar utilizados en estos kits DIY tengan terminales de soldadura expuestos y no incluyan cables pre-soldados.
Por lo tanto, es probable que necesites:
- Soldar cables a los terminales de cada uno de los dos motores. Se recomienda usar cables de un calibre adecuado (ej. 22-26 AWG) y de una longitud suficiente para alcanzar el driver de motor que planeas usar.
- Asegurar un buen aislamiento de las conexiones soldadas, por ejemplo, con tubo termorretráctil.
Si el kit sí incluyera motores con cables pre-soldados (a veces con conectores pequeños), esto simplificaría un poco el ensamblaje. Sin embargo, estar preparado para soldar los cables a los motores es una buena práctica al adquirir este tipo de kits de chasis DIY. Las imágenes del producto tampoco muestran claramente si los motores tienen cables.
Valoraciones (0)
Sé el primero en valorar “kit Robot oruga Tanque DIY con Motores”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados

Cableado y Conexionado

IC y Componentes (Circuitos Integrados)



Valoraciones
No hay valoraciones aún.