





Kit ensamblaje auto con chasis y ruedas con motoreductor
El precio original era: $ 8.990.$ 7.990El precio actual es: $ 7.990. IVA incluido
Kit de ensamblaje para auto con chasis, ruedas y motoreductor incluido, ideal para proyectos de robótica o modelismo. Permite armar un vehículo funcional con componentes básicos y fácil integración. Perfecto para aprendizaje y personalización.
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Solo quedan 3 disponibles
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
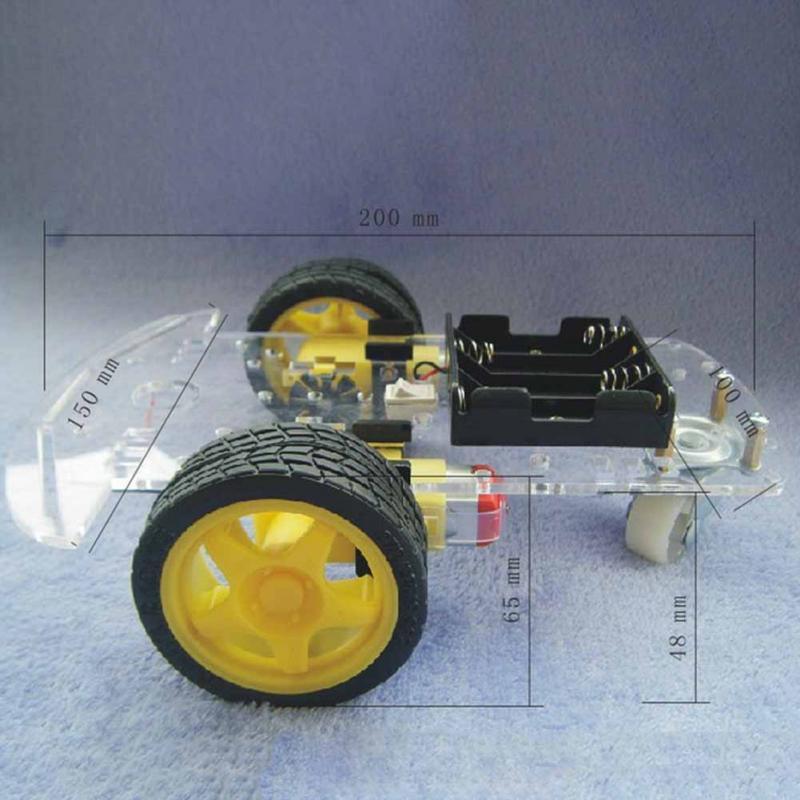
Chasis de auto robot con 3 Ruedas y compatible para ensamblaje basado en Arduino
La plataforma incluye 2 motores DC con reducción y sus respectivas llantas de
goma, las cuales gracias a su buena tracción puede trabajar sobre madera,
lona, metal, vidrio, etc.
El chasis de acrílico lo hace liviano y posee agujeros para el montaje del
portapila y para demás componentes electrónicos, como puede ser arduino,
sensores ultrasonido, servomotores, cámara vga, etc.
Características:
– Estructura mecánica simple, fácil de instalar.
– Caja porta pilas para 4 baterías AA.
– Perfecto para ser utilizado con otros equipos de robótica.
– Alimentación de 3~6V.
Incluye:
– 2x Motores DC con reducción
– 2x LLantas de goma
– 1x Rueda Loca
– 1x Portapila para 4 pilas AA
– 2x Encoders
– 4x Sujetadores de motor
– 1x Switch ON/OFF
– 10x tornillo M3
– 6x tuercas M3
– 4x Espaciadores M3
– 1x Chasis de Acrilico
Preguntas Frecuentes
¿Qué tipo de microcontrolador (ej. Arduino UNO, Nano, ESP32) es más adecuado para controlar este chasis de robot y qué driver de motor se recomienda para los dos motores DC con reducción?
Este chasis es compatible con una amplia gama de microcontroladores. La elección dependerá de la complejidad de tu proyecto:
- Arduino UNO o Nano (ATmega328P): Son excelentes opciones para principiantes y proyectos básicos de robótica móvil (seguidor de línea, evasor de obstáculos simple, control remoto básico). Son fáciles de programar y hay muchas librerías disponibles.
- ESP32 o ESP8266: Si deseas añadir conectividad WiFi o Bluetooth para control remoto a través de una app móvil, una interfaz web, o para proyectos IoT, estas placas son ideales. Ofrecen más potencia de procesamiento y memoria.
- Raspberry Pi (con un HAT de motor): Para proyectos más avanzados que requieran visión por computador, procesamiento intensivo, o un sistema operativo Linux completo.
Driver de Motor Recomendado:
- Los motores DC con reducción (tipo TT amarillos) incluidos suelen operar entre 3V y 6V y pueden consumir hasta 1A o más por motor bajo carga. No puedes controlarlos directamente desde los pines de un microcontrolador.
- Un driver de motor tipo Puente H es necesario. Opciones populares compatibles son:
- L298N: Un driver dual H-Bridge muy común y económico, capaz de controlar dos motores DC. Puede manejar la corriente de estos motores.
- DRV8833: Para aplicaciones de menor voltaje y corriente, o si buscas más eficiencia. Adecuado si alimentas los motores con 3V-5V.
- TB6612FNG: Más eficiente que el L298N y más compacto. Una excelente alternativa.
- Shields de Motor para Arduino: Existen muchos shields que se montan directamente sobre un Arduino UNO e incluyen drivers de motor.
La elección del driver dependerá del voltaje de tus motores y la corriente que necesiten.
El kit incluye dos «Encoders». ¿Cómo funcionan estos encoders con los motores DC y para qué tipo de control de movimiento son útiles (ej. control de velocidad, distancia)?
Los encoders incluidos con estos motores TT son típicamente encoders ópticos ranurados simples. Funcionan así:
- Componentes: Consisten en un disco con ranuras (o a veces reflectante con marcas) que se monta en el eje del motor (o en el eje de salida del reductor), y un sensor óptico (un emisor de luz IR y un fototransistor o fotodiodo) que detecta el paso de estas ranuras.
- Funcionamiento: A medida que el motor gira, el disco ranurado interrumpe el haz de luz entre el emisor y el detector. Cada interrupción genera un pulso digital en la salida del sensor.
- Información Obtenida:
- Velocidad: Contando el número de pulsos en un intervalo de tiempo determinado, puedes calcular la velocidad de rotación del motor (RPM).
- Distancia Recorrida: Si conoces el número de pulsos por revolución completa del eje de la rueda y el diámetro de la rueda, puedes calcular la distancia que ha recorrido el robot contando los pulsos totales.
- Tipo de Control de Movimiento:
- Control de Velocidad en Lazo Abierto (Estimado): Puedes intentar ajustar la velocidad variando el PWM aplicado al motor y usando los encoders para verificar si se acerca a la velocidad deseada.
- Control de Velocidad en Lazo Cerrado (PID): Para un control de velocidad preciso, puedes implementar un controlador PID (Proporcional-Integral-Derivativo) en tu microcontrolador. El PID usa la lectura de velocidad del encoder como retroalimentación para ajustar continuamente el PWM del motor y mantener la velocidad en el valor deseado, compensando variaciones de carga o batería.
- Movimiento a Distancia Específica: Programar el robot para que avance una distancia exacta contando los pulsos de los encoders.
- Giros Precisos: Haciendo que las ruedas de cada lado giren un número específico de pulsos.
Los encoders son fundamentales para implementar un control de movimiento más preciso y autónomo en tu robot.
¿Cuál es el voltaje de alimentación óptimo para los motores DC con reducción (3V-6V) y cómo afecta este voltaje a su torque y velocidad? ¿Puedo usar el portapilas AA incluido?
Los motores DC con reducción (tipo TT amarillos) tienen un rango de operación, pero su rendimiento varía con el voltaje:
- Rango de Voltaje: Especificado como 3V a 6V.
- A 3V: El motor funcionará a una velocidad y torque más bajos. El consumo de corriente será menor.
- A 6V: El motor alcanzará su velocidad y torque máximos (dentro de sus especificaciones). El consumo de corriente será mayor.
- Impacto del Voltaje:
- Velocidad (RPM): La velocidad de un motor DC es aproximadamente proporcional al voltaje aplicado (sin carga). Mayor voltaje = mayor velocidad.
- Torque: El torque de arranque y el torque máximo también aumentan con el voltaje (hasta cierto punto).
- Uso del Portapilas AA (4xAA):
- Pilas Alcalinas (1.5V c/u): 4 pilas alcalinas nuevas proporcionarán 4 x 1.5V = 6V. Este voltaje es ideal para obtener el máximo rendimiento de los motores.
- Pilas Recargables NiMH (1.2V c/u): 4 pilas NiMH recargables proporcionarán 4 x 1.2V = 4.8V. Los motores funcionarán bien, con una velocidad y torque ligeramente menores que a 6V, pero las NiMH suelen tener mejor capacidad de entrega de corriente que las alcalinas bajo carga.
El portapilas incluido es una forma conveniente de alimentar los motores. Asegúrate de usar pilas de buena calidad, especialmente si esperas un rendimiento alto. Si alimentas también un microcontrolador desde el mismo pack de baterías, ten en cuenta que los motores pueden causar caídas de voltaje al arrancar, lo que podría reiniciar el microcontrolador. A veces es mejor tener fuentes separadas o una buena regulación y capacitancia.
El chasis de acrílico se describe como «liviano» y con «agujeros para montaje». ¿Qué tan robusto es el acrílico para un robot y puedo añadir más perforaciones o modificarlo fácilmente?
El chasis de acrílico (PMMA) ofrece un buen equilibrio para kits DIY:
- Robustez:
- El acrílico es razonablemente rígido y fuerte para soportar el peso de los motores, baterías, un microcontrolador y varios sensores, siempre que el diseño del chasis sea adecuado (generalmente con un espesor de 2mm a 3mm para estos kits).
- Es «liviano», lo que ayuda a que los motores TT puedan mover el robot con agilidad.
- Limitación: El acrílico puede ser quebradizo. No soporta bien impactos fuertes y puede agrietarse si se aprietan demasiado los tornillos o si se flexiona excesivamente. No es tan resistente a los golpes como el metal o algunos plásticos de ingeniería (como el policarbonato).
- Agujeros de Montaje: La presencia de agujeros pre-perforados es una gran ventaja. Suelen estar espaciados para componentes comunes:
- Montaje de placas Arduino (UNO, Nano).
- Soportes para sensores ultrasónicos (HC-SR04).
- Servomotores (SG90).
- Portapilas.
- Modificación y Perforaciones Adicionales:
- Sí, puedes modificarlo y añadir más perforaciones. El acrílico se puede taladrar con brocas estándar (preferiblemente brocas para plástico o HSS afiladas).
- Precauciones al Modificar:
- Usa velocidades de taladrado bajas a medias para evitar que el acrílico se derrita o se agriete.
- Apoya bien la pieza sobre una superficie de descarte (madera) al taladrar.
- No apliques demasiada presión.
- Para cortes, una sierra de calar con hoja fina para plástico o una sierra manual de arco pueden funcionar, pero el corte por láser es ideal para formas limpias y complejas si tienes acceso a una.
¿Qué tipo de proyectos de robótica son ideales para este kit de 2 ruedas motrices y 1 rueda loca, y cuáles serían sus limitaciones en términos de maniobrabilidad o tipos de terreno?
Esta configuración de 2 ruedas motrices (en el centro o ligeramente adelantadas) y 1 rueda loca (caster wheel) en la parte trasera (o delantera) es muy común y versátil para robots de interior:
Proyectos Ideales:
- Robot Seguidor de Línea: Una aplicación clásica, donde el robot sigue una línea negra sobre un fondo blanco (o viceversa) usando sensores infrarrojos.
- Robot Evasor de Obstáculos: Utilizando sensores ultrasónicos o infrarrojos para detectar y esquivar objetos.
- Robot Controlado por Bluetooth/WiFi: Añadiendo un módulo como ESP8266 o usando un ESP32 para controlarlo desde un smartphone o PC.
- Robot Laberinto (Básico): Programándolo para navegar por laberintos simples.
- Plataforma de Experimentación: Como base para probar diferentes sensores, algoritmos de control y comportamientos.
Limitaciones:
- Maniobrabilidad:
- Giros: Puede girar sobre su eje (pivotar) variando la velocidad y dirección de las dos ruedas motrices (tracción diferencial). Esto le da buena agilidad en espacios reducidos.
- Movimiento Lateral: No puede moverse lateralmente de forma directa como un robot con ruedas omnidireccionales o mecanum.
- Tipos de Terreno:
- Ideal para Superficies Planas y Lisas: Como suelos de madera, baldosas, linóleo, o alfombras de pelo corto. La descripción menciona que las llantas de goma tienen buena tracción en madera, lona, metal, vidrio.
- Limitado en Terrenos Irregulares: No es ideal para terrenos muy accidentados, césped alto, arena suelta o superficies con muchos obstáculos pequeños, ya que la rueda loca puede atascarse y la altura libre al suelo suele ser baja.
- Pendientes: Puede subir pendientes suaves, pero su capacidad dependerá del torque de los motores, el peso total del robot y el agarre de las ruedas.
El kit incluye «4x Sujetadores de motor». ¿De qué material suelen ser y cómo aseguran los motores TT al chasis de acrílico?
Los sujetadores de motor para los motores TT amarillos en kits de chasis de acrílico suelen ser:
- Material: Comúnmente fabricados de plástico (a menudo acrílico transparente o de color, o a veces nylon inyectado).
- Diseño: Típicamente son piezas pequeñas con una forma que se adapta al contorno del motorreductor TT y con orificios que se alinean con los orificios de montaje del motor y los del chasis.
- A menudo son dos piezas por motor: una que se coloca por encima y otra por debajo del motor (o a los lados), y luego se atornillan juntas y/o al chasis, «abrazando» el motor.
- Otras veces es una sola pieza en forma de «U» o «L» por motor que se atornilla al chasis y presiona el motor contra él.
- Función de Sujeción:
- Fijación Segura: Su principal función es mantener los motores firmemente sujetos al chasis para que no se muevan ni vibren excesivamente durante la operación.
- Transmisión de Torque: Aseguran que el torque generado por los motores se transmita eficientemente a las ruedas y al movimiento del chasis.
- Alineación: Ayudan a mantener la alineación correcta de los motores y los ejes de las ruedas.
Se utilizan los tornillos y tuercas M3 incluidos en el kit para fijar estos sujetadores al chasis y, a través de ellos, asegurar los motores. Es importante apretarlos lo suficiente para una sujeción firme, pero sin excederse para no dañar el chasis de acrílico o los propios sujetadores si son de plástico.
¿Es necesario soldar los cables a los terminales de los motores DC con reducción, o suelen venir con cables pre-soldados o terminales tipo pala?
La forma en que vienen los terminales de los motores DC con reducción (tipo TT amarillos) puede variar ligeramente entre fabricantes o lotes, pero lo más común es:
- Terminales para Soldar: La gran mayoría de estos motores vienen con dos terminales metálicos planos (lengüetas) a los que se deben soldar los cables de alimentación. Estos terminales suelen tener pequeños orificios para facilitar la inserción del cable antes de soldar.
- Cables Pre-Soldados (Menos Común en kits básicos): Algunos proveedores pueden ofrecerlos con cables cortos ya soldados, pero esto no es el estándar para los kits DIY más económicos donde se asume que el usuario realizará la soldadura.
- Terminales Tipo Pala (Raro para este motor): No es común que estos motores TT pequeños vengan con terminales tipo pala (spade connectors) que permitan una conexión sin soldadura.
Para este kit específico: Dado que es un «Kit de ensamblaje DIY» y la descripción no menciona cables pre-soldados en los motores, es muy probable que necesites soldar los cables (que usarás para conectar al driver de motor) a los terminales de cada uno de los dos motores DC.
Esto implica tener:
- Cautín y estaño.
- Cable de un calibre adecuado (ej. 22-26 AWG).
- Opcionalmente, tubo termorretráctil para aislar las conexiones soldadas.
Es una habilidad básica en electrónica que este tipo de kit ayuda a desarrollar.
El chasis incluye una «Rueda Loca». ¿Qué función cumple esta rueda en un robot de dos ruedas motrices y qué tipo de rueda loca es (ej. bola, omnidireccional, estándar)?
La «Rueda Loca» (o caster wheel) en un robot con dos ruedas motrices cumple una función de soporte y estabilidad, permitiendo al mismo tiempo la maniobrabilidad.
- Función Principal:
- Soporte: Proporciona un tercer (o cuarto, si hay dos ruedas locas) punto de apoyo para el chasis, evitando que se incline o se arrastre.
- Estabilidad: Ayuda a mantener el robot equilibrado mientras se mueve o está detenido.
- Maniobrabilidad: Está diseñada para girar libremente en cualquier dirección (360 grados sobre su eje vertical). Esto permite que el robot gire fácilmente sobre su eje cuando las dos ruedas motrices giran en direcciones opuestas (tracción diferencial), ya que la rueda loca simplemente se alinea con la dirección del movimiento.
- Tipo de Rueda Loca Común en estos Kits:
- Lo más probable es que sea una rueda loca estándar con una sola rueda de plástico o nylon montada en una horquilla giratoria. La rueda en sí gira sobre su propio eje horizontal, y toda la horquilla gira sobre un eje vertical.
- Menos común en kits básicos, pero posible, es una rueda loca de bola (ball caster), donde una esfera metálica o plástica grande rota dentro de una carcasa con pequeñas bolas de rodamiento. Estas ofrecen muy baja fricción y movimiento omnidireccional suave.
- No suele ser una rueda omnidireccional (como las usadas en robots holonómicos), ya que estas tienen un propósito diferente y se usan en configuraciones de múltiples ruedas motrices.
La rueda loca es un componente simple pero esencial para la funcionalidad de este tipo de plataforma robótica de tracción diferencial.
Valoraciones (0)
Sé el primero en valorar “Kit ensamblaje auto con chasis y ruedas con motoreductor”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados




Cableado y Conexionado
Bolsa de 100 Terminales Tipo Bala Aislado AWG Macho y Hembra Rojo y Azul

Valoraciones
No hay valoraciones aún.