

Kit Starter IoT Electrónica con Placa de Desarrollo ESP32-C3 Super Mini WIFI
El precio original era: $ 29.990.$ 21.990El precio actual es: $ 21.990. IVA incluido
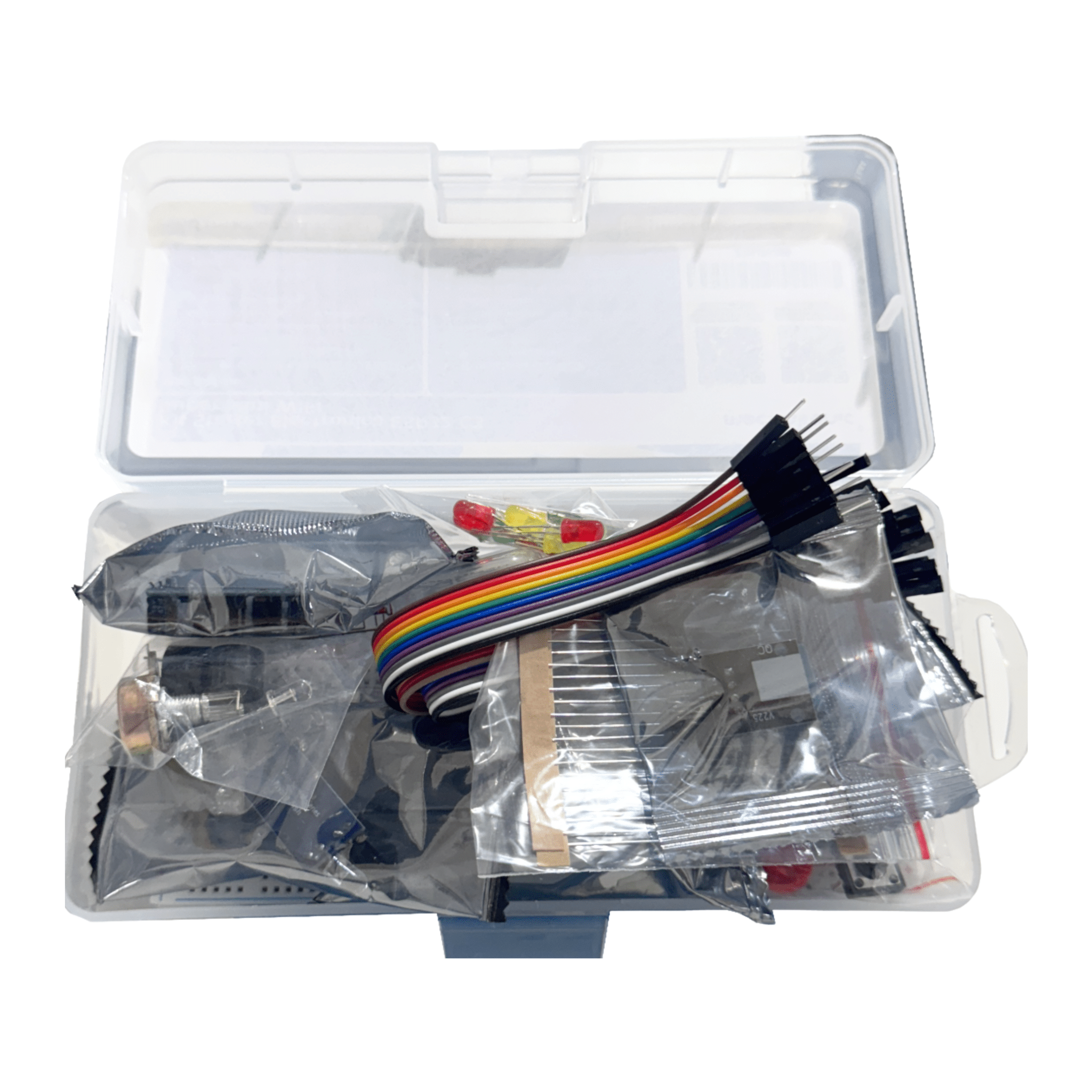
Este kit es perfecto para quienes desean iniciarse en la electrónica y programación. Incluye todos los componentes esenciales, como la placa de desarrollo ESP32-C3 mini, sensores, pantallas OLED y cables de conexión, para que puedas crear proyectos innovadores fácilmente. Con este kit podrás controlar dispositivos como LEDs, sensores de temperatura y humedad, y mucho más. Ideal para desarrollar sistemas de automatización, seguridad y dispositivos inteligentes mientras aprendes de manera práctica.
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Hay existencias
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
El Kit Starter con Placa de Desarrollo WIFI ESP32-C3 Super Mini es la elección perfecta para aquellos que desean iniciarse en el mundo de la electrónica y la programación. Este kit básico está diseñado especialmente para principiantes, ofreciendo una manera fácil y accesible de aprender. Con este kit, podrás comenzar a programar y explorar el potencial de los módulos ESP32, conocidos por su versatilidad y potencia.
Gracias a sus componentes esenciales, podrás controlar una variedad de módulos, como LEDs, sensores de temperatura y humedad (DHT11), pantallas OLED y mucho más. Esto te permitirá desarrollar proyectos interactivos y aprender de manera práctica sobre la integración de dispositivos y la programación. Además, la facilidad de uso del kit te permitirá experimentar con circuitos sin complicaciones.
El kit incluye una placa de desarrollo ESP32-C3 Super Mini, sensores de movimiento PIR, un módulo de relé de 2 canales, resistores, cables de conexión y mucho más. Todo lo necesario para que puedas comenzar tu viaje en la electrónica y programación desde el primer momento.
Este kit no solo es ideal para aprender, sino también para desarrollar tus propios proyectos, como sistemas de automatización del hogar, estaciones meteorológicas, y dispositivos inteligentes. La flexibilidad del ESP32-C3 mini permite que puedas adaptar tus proyectos a tus necesidades.
Listado de contenidos del kit:
- Placa de desarrollo ESP32-C3 Super Mini: El corazón del kit, que permite la programación y control de otros módulos.
- Pantalla OLED de 0.96 pulgadas: Muestra información visual en tus proyectos electrónicos.
- Protoboard de 830 puntos: Ideal para realizar conexiones rápidas sin necesidad de soldar.
- Módulo de evitación de obstáculos: Detecta obstáculos y permite la creación de robots o dispositivos autónomos.
- Módulo de resistor fotosensible: Detecta la cantidad de luz ambiental y puede ser utilizado en proyectos de sensores de luz.
- Módulo de temperatura y humedad DHT11: Monitorea las condiciones ambientales, útil para estaciones meteorológicas y proyectos de domótica.
- Sensor de movimiento PIR HC-SR501: Detecta movimiento, perfecto para sistemas de seguridad o automatización del hogar.
- Potenciómetro de 10K: Ajusta la resistencia y el voltaje, útil para controlar la intensidad de luz o la velocidad de motores.
- 20 resistores (220R/10K): Usados para limitar el flujo de corriente y proteger tus circuitos.
- Buzzer pasivo y activo: Emite sonidos en tus proyectos, útil para alarmas o notificaciones.
- Módulo de relé de 5V y 2 canales: Controla dispositivos eléctricos de alta corriente a través de la placa ESP32.
- 6 interruptores de botón: Activa o desactiva circuitos de manera sencilla.
- Cables Dupont F-M, F-F, M-M: Conecta componentes entre sí, facilitando las conexiones en el protoboard.
- LEDs (rojos, amarillos, verdes y RGB): Indican el estado de tu proyecto o se utilizan en sistemas de señalización.
Preguntas Frecuentes
El kit menciona «dos motores tipo TT y motoreductores». ¿Qué relación de reducción suelen tener estos motoreductores y cómo afecta esto al torque y la velocidad del robot tanque?
Los motores «tipo TT» amarillos con motoreductor son muy comunes en kits de robótica DIY. La relación de reducción del motoreductor es un factor clave que determina el equilibrio entre torque (fuerza de giro) y velocidad (RPM) en las orugas:
- Relaciones Comunes: Estos motoreductores suelen venir con relaciones de reducción como 1:48, 1:120, o incluso mayores (ej. 1:200). Una relación de 1:48 significa que el motor debe girar 48 veces para que el eje de salida (donde va la rueda motriz de la oruga) gire una vez.
- Impacto en Torque y Velocidad:
- Mayor Reducción (ej. 1:120): Resulta en mayor torque (más fuerza para mover el tanque, superar obstáculos o terrenos difíciles) pero menor velocidad de las orugas.
- Menor Reducción (ej. 1:48): Proporciona menor torque pero mayor velocidad.
- Aplicación en Tanques: Para un robot tipo tanque con orugas, que a menudo se espera que tenga buena tracción y capacidad para superar pequeños obstáculos, una relación de reducción media a alta (como 1:48 o 1:120) es generalmente preferible para asegurar suficiente torque. La descripción no especifica la relación exacta, pero puedes esperar un buen compromiso para un rendimiento general en «terrenos variados».
Conocer la relación de reducción te ayuda a anticipar el comportamiento dinámico del robot y a seleccionar el driver de motor y la fuente de alimentación adecuados.
¿Qué tipo de batería o fuente de alimentación se recomienda para los dos motores TT de este kit, considerando su voltaje y consumo de corriente típico al mover un chasis tipo tanque?
Los motores tipo TT suelen operar en un rango de voltaje de 3V a 6V (algunos hasta 9V, pero 6V es un límite común para una buena vida útil). Al mover un chasis tipo tanque, que implica fricción de las orugas y el peso de la estructura y componentes adicionales, el consumo de corriente puede ser significativo, especialmente al arrancar, subir pendientes o sobre terrenos difíciles.
- Voltaje Recomendado: Una fuente de alimentación o batería que proporcione entre 4.5V y 6V es ideal. Un pack de 4 pilas AA (alcalinas nuevas = 6V, recargables NiMH = 4.8V) es una opción común. También baterías LiPo de 1 celda (3.7V nominales, 4.2V cargada) a veces se usan, pero el voltaje puede ser un poco bajo para un rendimiento óptimo sin un conversor boost. Una LiPo de 2 celdas (7.4V) sería demasiado alta sin un regulador de voltaje para los motores.
- Capacidad de Corriente: Cada motor TT puede consumir entre 150mA y 250mA sin carga, y esta corriente puede aumentar a 0.8A – 1.5A o más por motor bajo carga pesada o si se atascan. Por lo tanto, tu fuente de alimentación debe ser capaz de suministrar al menos 1.6A a 3A continuos para los dos motores, con capacidad para picos mayores.
- Opciones de Batería:
- Pilas AA (Alcalinas o NiMH): Un portapilas de 4xAA es una solución sencilla. Las NiMH recargables son preferibles por su capacidad de entregar mayor corriente.
- Baterías LiPo/Li-ion: Si usas LiPo/Li-ion, asegúrate de que tengan una tasa de descarga (C-rating) adecuada y utiliza un circuito de protección de batería (BMS) si no lo incluye. Un buck converter podría ser necesario para reducir el voltaje si usas packs de más de 6V.
Una fuente de alimentación inadecuada resultará en un rendimiento pobre, reinicios del microcontrolador (si comparte la fuente) o daños a la batería.
Al ser un kit DIY, ¿la estructura del chasis del tanque está hecha de qué material y qué tan fácil es modificarla o añadirle perforaciones para componentes personalizados?
Los chasis de este tipo de kits DIY para robots tanque suelen estar fabricados con materiales ligeros y fáciles de trabajar:
- Material Común: A menudo se utiliza acrílico (PMMA) o a veces PVC expandido o incluso madera contrachapada delgada (MDF). El acrílico es popular por su rigidez, facilidad de corte por láser y apariencia.
- Modificación:
- Acrílico/PVC: Son relativamente fáciles de perforar con brocas estándar para plástico (usando bajas velocidades para evitar que se derrita o agriete). Se pueden cortar con sierras de calar o sierras manuales para plásticos, aunque el corte láser es ideal para formas complejas.
- MDF: Muy fácil de taladrar y cortar con herramientas de carpintería estándar.
- Consideraciones:
- El acrílico puede ser quebradizo si se somete a un estrés excesivo o se aprietan demasiado los tornillos.
- Al perforar, es bueno empezar con una broca pequeña y aumentar gradualmente el tamaño, y apoyar bien la pieza para evitar vibraciones.
La descripción menciona una «estructura robusta y duradera» y que es «perfecto para personalizaciones», lo que sugiere que el material permite modificaciones. La presencia de orificios preexistentes para montar componentes estándar (como placas Arduino, sensores) es común en estos kits, pero siempre puedes añadir más según tus necesidades.
Si quiero que mi robot tanque siga líneas o evite obstáculos, ¿qué tipo de sensores comunes son compatibles y fáciles de integrar con este chasis y un microcontrolador?
Este chasis de robot tanque es una excelente base para implementar funcionalidades autónomas. Los sensores comunes y fáciles de integrar con un microcontrolador (como Arduino) incluyen:
- Para Seguimiento de Líneas:
- Sensores Infrarrojos Reflectivos (ej. TCRT5000, CNY70): Se montan en la parte inferior frontal del chasis, apuntando hacia el suelo. Detectan la diferencia de reflectividad entre una línea oscura y una superficie clara (o viceversa). Usualmente se usan varios (2 a 5) para un seguimiento más preciso.
- Para Evitar Obstáculos:
- Sensores Ultrasónicos (ej. HC-SR04): Se montan en el frente (y a veces en los lados). Emiten un pulso ultrasónico y miden el tiempo que tarda en rebotar, calculando así la distancia a un obstáculo.
- Sensores Infrarrojos de Proximidad (ej. Sharp GP2Y0A21YK0F o módulos más simples): También detectan la presencia de objetos, a menudo con un rango más corto pero pueden ser más compactos que los ultrasónicos.
- Montaje: El chasis suele tener espacio en la parte superior o frontal para montar estos sensores. Puedes usar tornillos pequeños, cinta adhesiva de doble cara resistente, o diseñar e imprimir en 3D soportes específicos para los sensores si la estructura lo permite.
El microcontrolador leería los datos de estos sensores y, basándose en la lógica programada, controlaría los motores a través de un driver para dirigir el robot.
¿Las orugas de este kit requieren algún tipo de mantenimiento o ajuste periódico para un rendimiento óptimo, y están hechas de un material que ofrezca buen agarre?
Sí, como cualquier sistema mecánico con partes móviles, las orugas pueden beneficiarse de un mantenimiento y ajuste básicos:
- Material de las Orugas: Suelen estar hechas de goma o un plástico flexible similar. Este material se elige para proporcionar un buen agarre en una variedad de superficies, desde suelos lisos hasta terrenos ligeramente irregulares o alfombras.
- Tensión de las Orugas:
- Es importante que las orugas tengan una tensión adecuada. Si están demasiado flojas, podrían salirse de las ruedas motrices o locas, especialmente en giros o terrenos difíciles. Si están demasiado tensas, pueden generar fricción excesiva, desgastar los componentes más rápido y exigir más a los motores.
- Algunos chasis de tanque DIY permiten ajustar la posición de las ruedas locas (idler wheels) para tensar las orugas. Si este kit no tiene un mecanismo de ajuste explícito, la tensión viene dada por la longitud de la oruga y la distancia entre las ruedas.
- Limpieza: Con el tiempo, las orugas pueden acumular polvo, pelos, o suciedad del terreno. Limpiarlas periódicamente con un cepillo suave o un paño húmedo puede ayudar a mantener un buen agarre y un funcionamiento suave.
- Inspección de Ruedas: Verifica que las ruedas motrices (conectadas a los motores) y las ruedas locas giren libremente y no tengan obstrucciones.
Aunque estos kits están diseñados para ser bastante robustos para uso DIY, una inspección ocasional ayudará a prolongar la vida útil y mantener el rendimiento del robot tanque.
Valoraciones (0)
Sé el primero en valorar “Kit Starter IoT Electrónica con Placa de Desarrollo ESP32-C3 Super Mini WIFI”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados





Valoraciones
No hay valoraciones aún.