

Módulo Brújula Digital GY-271 Magnetómetro de 3 Ejes
$ 3.790 IVA incluido
Descubre el Módulo Brújula Digital GY-271, un Magnetómetro de 3 Ejes perfecto para drones y robots autónomos. Su diseño compacto y versátil simplifica la integración en tus proyectos con interfaz I2C, alimentación directa de 5V, y compatibilidad con 3.3V y 5V. Eficiente en el consumo de energía, garantiza un rendimiento excepcional, ofreciendo una medición precisa del campo magnético en tres ejes para detalles nítidos. Explora con precisión y eficacia con este dispositivo innovador.
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Hay existencias
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
Información
El GY-271 no solo actúa como una brújula digital, sino que también es esencial para aplicaciones avanzadas que requieren mediciones precisas del campo magnético terrestre. Su interfaz I2C permite una integración sencilla con microcontroladores y otros sistemas digitales, mientras que su regulador de voltaje incorporado facilita la alimentación directa desde fuentes de 5V, garantizando compatibilidad con dispositivos que operan a 3.3V.Este módulo es ideal para proyectos de robótica, drones (UAVs) y cualquier aplicación que necesite determinar la dirección del norte magnético con alta precisión. Su diseño compacto y bajo consumo energético lo hacen perfecto para dispositivos portátiles.
Especificaciones
| Especificación | Detalles |
|---|---|
| Voltaje de Alimentación | 3.3V – 6V |
| Consumo Actual | 100μA (standby 2μA) |
| Interfaz | I2C |
| Velocidad de Transmisión | 400kHz |
| Sensibilidad | 230-1370 LSB / Gs |
| Resolución | 0.73-4.35mGs |
| Frecuencia de Muestreo | 75Hz |
| Medición del Campo Magnético | En tres ejes de ±8 Gauss con una resolución de 5 mili gauss |
| Interrupción | Pin DRDY (Data Ready) |
| Tamaño Compacto | Adecuado para drones y sistemas de navegación autónomos |
| Chip Utilizado | HMC5883L |
| Aplicaciones Comunes | Navegación, robots autónomos, magnetometría, brújula electrónica, servicios basados en localización. |
Documentación
Información Adicional
Aplicaciones
- Navegación: Utilizado en sistemas de navegación para determinar la dirección del norte magnético, lo que es esencial para la orientación en proyectos como drones (UAVs) y vehículos autónomos.
- Robótica: Integrado en robots para proporcionar información de rumbo y permitir la navegación autónoma en entornos desconocidos.
- Magnetometría: Empleado en estudios geofísicos y de campo para medir campos magnéticos y realizar análisis geológicos.
- Brújulas Electrónicas: Funciona como una brújula digital, proporcionando datos precisos sobre la orientación.
- Servicios Basados en Localización: Utilizado en aplicaciones que requieren información de ubicación precisa, como sistemas de seguimiento y posicionamiento.
Principio de Funcionamiento
El GY-271 opera mediante el uso del efecto Hall, que permite detectar cambios en los campos magnéticos. A continuación se describen los principales aspectos de su funcionamiento:
- Sensores de Tres Ejes: El módulo está equipado con sensores que miden el campo magnético en tres ejes (X, Y, Z), lo que permite determinar la dirección del campo magnético terrestre.
- Salida Digital: El sensor convierte las lecturas del campo magnético en voltajes diferenciales, que se procesan para obtener un valor digital que representa la intensidad del campo magnético en cada eje.
- Interfaz I2C: La comunicación con microcontroladores se realiza a través de la interfaz I2C, lo que facilita su integración con sistemas como Arduino y Raspberry Pi.
- Calibración: Para obtener lecturas precisas, el sensor puede requerir calibración para compensar interferencias magnéticas externas y asegurar que las lecturas reflejen correctamente el norte magnético.
- Modo de Funcionamiento: El GY-271 puede operar en modo continuo o modo de medida única, permitiendo flexibilidad según las necesidades del proyecto.
Este módulo es una herramienta poderosa para cualquier proyecto que requiera mediciones precisas del campo magnético y navegación, ideal para entusiastas de la electrónica y desarrolladores.
Preguntas Frecuentes
¿Es este un sensor de 9 ejes (IMU)? La categoría menciona acelerómetro y giroscopio.
No, y esta es una aclaración importante. Este módulo es un magnetómetro de 3 ejes puro. Su única función es medir la dirección e intensidad del campo magnético (como una brújula digital), lo que te permite obtener un rumbo o «yaw» estable. No contiene un acelerómetro ni un giroscopio. Para un sistema completo de navegación de 9 o 10 grados de libertad (9/10-DOF IMU), necesitarías combinar este sensor con otro que sí incluya un acelerómetro y un giroscopio (como un MPU-6050) y un sensor de presión (como el BMP280).
El chip HMC5883L es de 3.3V, pero la placa dice 3.3V-6V. ¿Puedo conectarlo directamente a un Arduino UNO de 5V?
Sí, puedes, y esta es una de las grandes ventajas de este módulo. La placa incluye un regulador de voltaje integrado y un circuito de conversión de nivel lógico. Esto significa que:
- Puedes alimentar el pin VCC del módulo directamente desde el pin de 5V de tu Arduino UNO. El regulador en la placa lo reducirá a los 3.3V que el chip HMC5883L necesita.
- Puedes conectar los pines SDA y SCL directamente a los pines A4 y A5 del UNO sin riesgo, ya que el conversor de nivel se encarga de que las señales sean seguras para el sensor.
Esto lo hace una solución «plug-and-play» muy segura para placas de 5V.
Mis lecturas de la brújula son incorrectas o no son estables. ¿Qué estoy haciendo mal?
Este es el problema más común con los magnetómetros y casi siempre se debe a dos factores:
- Interferencia Magnética: El sensor es extremadamente sensible a los campos magnéticos. Debes montarlo lo más lejos posible de motores, cables de alta corriente, imanes y grandes piezas metálicas de tu robot.
- Calibración: Todo magnetómetro requiere ser calibrado en su ubicación final para compensar las distorsiones del campo magnético local (conocidas como «hard-iron» y «soft-iron»). Utiliza un sketch de calibración en tu Arduino que te pida mover el sensor en todas las orientaciones posibles. Este proceso calculará unos valores de «offset» que luego debes aplicar en tu código principal para obtener una lectura precisa del norte magnético.
Sin calibración, las lecturas de la brújula no serán fiables.
¿Qué diferencia hay entre este módulo GY-271 (con chip HMC5883L) y el módulo GY-273?
Aunque físicamente son muy parecidos, la diferencia está en el chip que utilizan, lo cual afecta la compatibilidad:
- GY-271 (este módulo): Usa el chip original HMC5883L de Honeywell. Es el chip clásico y la mayoría de las librerías y tutoriales más antiguos están escritos para él.
- GY-273: Generalmente usa un clon llamado QMC5883L. Aunque es funcionalmente similar, tiene una dirección I2C diferente y registros internos distintos. Esto significa que una librería escrita para el HMC5883L no funcionará con el QMC5883L y viceversa. Debes usar la librería correcta para el chip específico que tienes.
¿Qué librería de Arduino es la más recomendada para este sensor?
Para el chip HMC5883L de este módulo, la librería más robusta y utilizada es la «Adafruit HMC5883L Unified», que funciona en conjunto con la librería «Adafruit Unified Sensor». La puedes instalar directamente desde el gestor de librerías del IDE de Arduino. Incluye ejemplos claros para leer los datos del campo magnético y calcular un rumbo en grados.
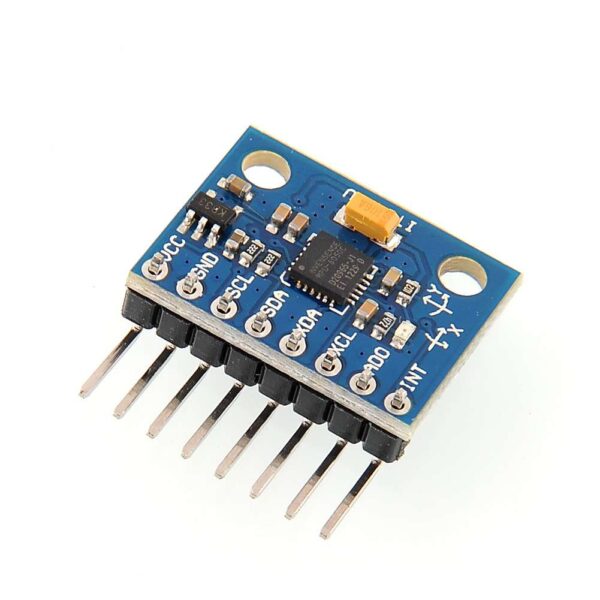
¿Es importante la orientación en la que monto el sensor en mi robot o dron?
Sí, es absolutamente crítico. El sensor mide la fuerza del campo magnético en tres ejes perpendiculares (X, Y, Z) que están marcados en la propia placa. Para que la fórmula que convierte estas lecturas en un rumbo (heading) funcione, debes asegurarte de que los ejes del sensor estén alineados con los ejes de tu vehículo. Por ejemplo, es común alinear el eje X del sensor apuntando hacia el frente del robot. Si lo montas en una orientación diferente, deberás ajustar las fórmulas en tu código para compensar esa rotación.
Valoraciones (0)
Sé el primero en valorar “Módulo Brújula Digital GY-271 Magnetómetro de 3 Ejes”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados



Acelerómetro y Giroscopio

Valoraciones
No hay valoraciones aún.