

Modulo Final De Carrera
$ 1.990 IVA incluido
El Módulo Final de carrera es un sensor mecánico que detecta colisiones o impactos físicos. Al recibir un golpe, su interruptor integrado se activa, enviando una señal de detección a microcontroladores como Arduino o Raspberry Pi.
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Solo quedan 5 disponibles
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
Información
¿Qué es?
El Módulo Modulo Final De Carrera es un sensor de impacto que detecta colisiones mediante un interruptor mecánico de resorte. Cuando el módulo recibe un golpe o impacto, su interruptor interno se cierra y envía una señal digital de detección. Es ampliamente utilizado en proyectos de robótica, automatización y sistemas de seguridad.
¿Para qué sirve?
- Detección de colisiones en robots y vehículos autónomos.
- Activación de respuestas automáticas ante golpes o impactos.
- Implementación en sistemas de seguridad para detectar aperturas o movimientos bruscos.
- Aplicaciones en juguetes y dispositivos interactivos que requieren respuesta táctil.
¿Dónde se usa?
- Robótica: Para evitar colisiones y mejorar la navegación en robots móviles.
- Seguridad: Detección de golpes en puertas o sistemas de alarma.
- Automatización industrial: Sensores de impacto en máquinas y equipos industriales.
- Electrónica de consumo: Implementación en dispositivos de detección de contacto.
¿Con qué se puede usar?
- Microcontroladores: Compatible con Arduino, ESP8266, ESP32, Raspberry Pi, STM32, PIC, AVR y otros.
- Sistemas electrónicos: Puede integrarse con relés, luces o motores para activar respuestas automáticas.
- Placas de desarrollo: Funciona con módulos de expansión y shields compatibles con sensores digitales.
Características destacadas
- Sensor mecánico de impacto: Detecta colisiones mediante un interruptor de resorte.
- Salida digital: Fácil integración con microcontroladores y sistemas de control.
- Bajo consumo de energía: Ideal para dispositivos alimentados por baterías.
- Compacto y fácil de instalar: Diseño pequeño para aplicaciones en espacios reducidos.
- Compatibilidad con plataformas de desarrollo: Compatible con Arduino, Raspberry Pi, ESP8266, entre otros.
Especificaciones
| Especificación | Detalles |
|---|---|
| Voltaje de operación | 3.3V – 5V DC |
| Tipo de señal | Digital (0 o 1) |
| Consumo de corriente | Bajo (<10 mA) |
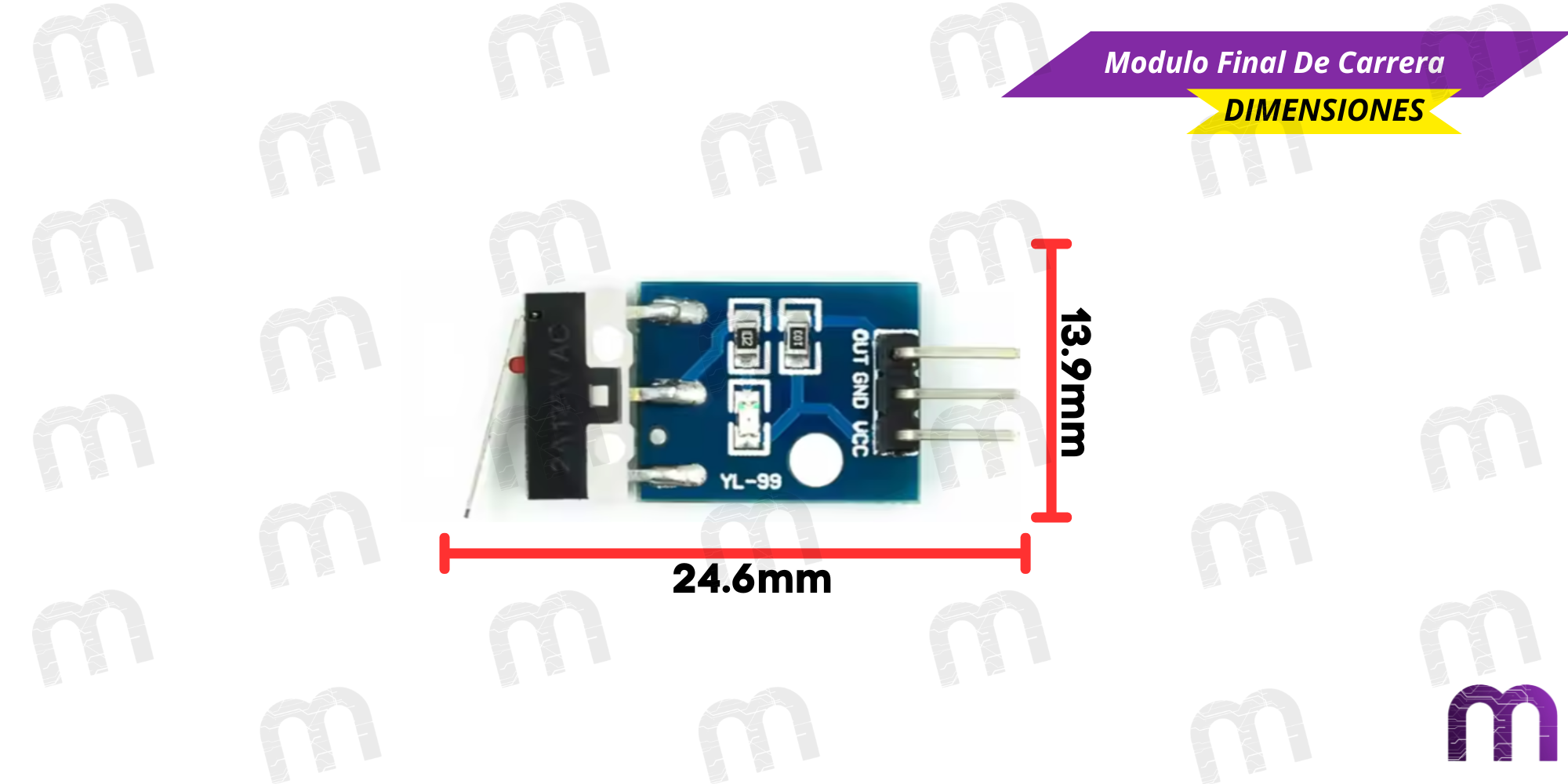
| Dimensiones | 28 mm x 15 mm x 10 mm |
| Salida de señal | Alta (1) sin impacto, Baja (0) con impacto |
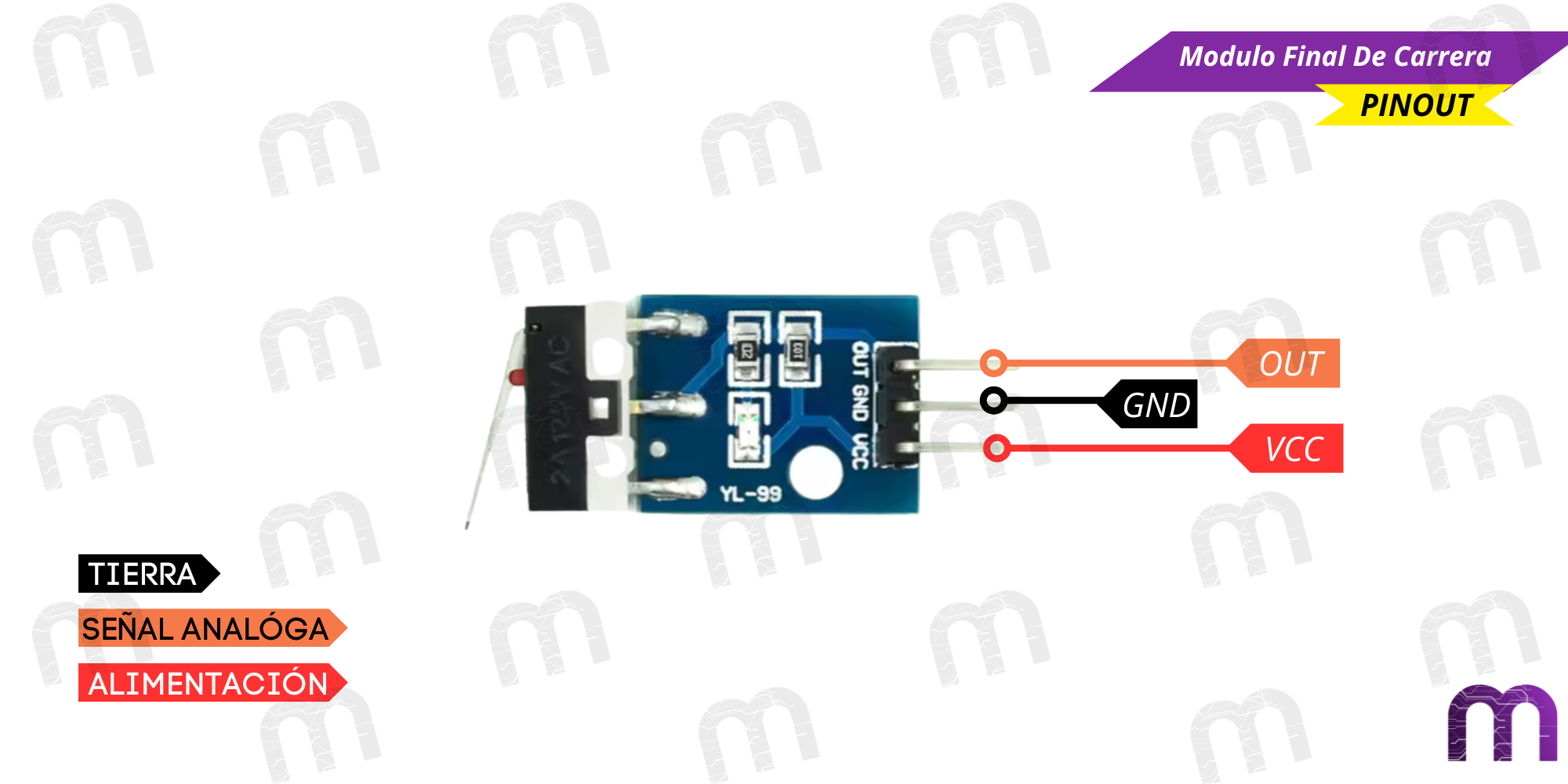
| Interfaz | 3 pines: VCC, GND, OUT |
| Modo de detección | Sensor de impacto mecánico |
Documentación
Información Adicional
Pinout

Dimensiones

Principio de funcionamiento
El YL-99 utiliza un interruptor mecánico de resorte que, al recibir un golpe o vibración, cierra el circuito y genera una señal digital en su salida. La señal puede ser utilizada por un microcontrolador para activar acciones específicas, como detener un robot o encender una alerta.
Modos de uso
- Detección de colisión: Si un robot choca contra un obstáculo, el sensor lo detecta y activa una respuesta para evitar el impacto.
- Activación por golpe: Puede ser usado en sistemas de seguridad donde un golpe desencadene una alarma.
- Interacción táctil: En dispositivos electrónicos que reaccionan al contacto físico.
Preguntas Frecuentes
¿Cuál es la diferencia entre este módulo y un «final de carrera» tradicional con palanca (endstop)?
Esta es una distinción crucial. Aunque el nombre es similar, su función es diferente:
- Un final de carrera tradicional (endstop) usa un microinterruptor con una palanca metálica. Está diseñado para la detección de posición precisa y repetible. Es ideal para decirle a una máquina (como una impresora 3D o CNC) que ha llegado al punto exacto de «cero» en un eje.
- Este módulo de impacto utiliza un resorte interno. Su propósito es detectar una colisión o un golpe brusco, no una posición exacta. Es perfecto para que un robot sepa que ha chocado con una pared, pero no para saber si un eje se ha movido 0.1mm.
En resumen, usa un endstop para «posicionamiento» y este módulo para «detección de impacto».
¿Cómo conecto este módulo a un Arduino y qué debo considerar en el código?
La conexión es muy sencilla. Solo necesitas 3 pines:
- VCC: Conectar a 5V o 3.3V en tu Arduino.
- GND: Conectar a GND (tierra) en tu Arduino.
- OUT: Conectar a cualquier pin de entrada digital (ej. Pin 2).
En el código, leerás el pin con digitalRead(). El módulo entrega un estado ALTO (HIGH) en reposo y un estado BAJO (LOW) momentáneamente cuando detecta un golpe. Consideración crítica: Como es un interruptor mecánico, sufre de «rebote» (múltiples señales falsas en un solo golpe). Para una lectura fiable, debes implementar una técnica de «debounce» en tu software. El método más efectivo es usar la función millis() para ignorar lecturas rápidas después del primer impacto detectado.
¿Qué tan sensible es este módulo? ¿Puedo ajustar la sensibilidad del impacto?
La sensibilidad de este módulo está determinada por las propiedades mecánicas del resorte interno y no es ajustable. Está diseñado para detectar impactos o golpes directos y relativamente bruscos. No es adecuado para detectar vibraciones suaves, inclinaciones lentas o una presión constante. Por ejemplo, detectará perfectamente si un robot choca contra una pata de la mesa, pero probablemente no detectará si alguien lo empuja suavemente con el dedo.
¿En qué se diferencia este sensor de un módulo de vibración (como el SW-420) o un sensor piezoeléctrico?
Son tres sensores con principios diferentes para distintas aplicaciones:
-
- Este Módulo de Impacto (resorte): Es un interruptor binario (ON/OFF). Solo te dice «hubo un golpe» o «no hubo un golpe». Es simple y robusto para detección de colisiones claras.
– Módulo de Vibración (ej. SW-420): También es digital, pero está diseñado para detectar un rango más amplio de vibraciones u oscilaciones, no solo impactos directos. A menudo incluyen un potenciómetro para ajustar el umbral de sensibilidad.
- Sensor Piezoeléctrico: Es un sensor analógico. No solo detecta el golpe, sino que genera un voltaje proporcional a la fuerza o presión del impacto. Es mucho más sensible y te permite medir «qué tan fuerte» fue el golpe.
¿Qué tipo de proyectos de robótica se benefician más de este tipo de sensor?
Este módulo es ideal para proyectos donde se necesita una detección de contacto simple y fiable. Es perfecto para:
- Bumpers para robots móviles: Colocar uno en la parte delantera de un robot evasor de obstáculos. Al chocar, el robot sabe que debe retroceder y cambiar de dirección.
- Sistemas de alarma simples: Instalarlo en una puerta o ventana para detectar si alguien la golpea o intenta forzarla.
- Juguetes interactivos: Crear un juguete que reacciona (emite un sonido, enciende una luz) cuando se le da un golpecito.
- Proyectos de «caja secreta»: Diseñar un contenedor que solo se abre al recibir una secuencia de golpes específica.
¿Qué consideraciones de montaje físico debo tener para asegurar una detección fiable?
El montaje es clave para el buen funcionamiento. Utiliza el orificio de montaje de la placa para fijarla firmemente con un tornillo (normalmente M3) a tu chasis o estructura. La orientación es importante: para una máxima sensibilidad, el módulo debe estar montado de tal forma que el impacto esperado ocurra en una dirección perpendicular al resorte (es decir, un golpe lateral al resorte). Montarlo de manera que el impacto sea a lo largo del eje del resorte (de punta) reducirá significativamente su capacidad de detección.
Valoraciones (0)
Sé el primero en valorar “Modulo Final De Carrera”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados



Valoraciones
No hay valoraciones aún.