

Motor DC Brushless 12V 159 RPM Con Encoder y Controlador Incluidos.
$ 19.990 IVA incluido
Este motor DC Brushless es una revolución: Puedes usarlo directamente con un arduino, sin utilizar drivers o encoders adicionales, ya que todo esto viene incluido dentro del mismo! solo debes conectarlo y utilizarlo.
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Sin existencias
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
Motor DC Brushless 12V 159 RPM con encoder y controlador incluidos.
Este motor DC revolucionario cuenta con un encoder interno y un controlador de giro, de forma que solo debas conectarlo al arduino y usarlo!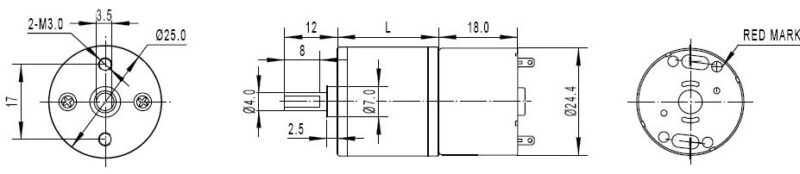
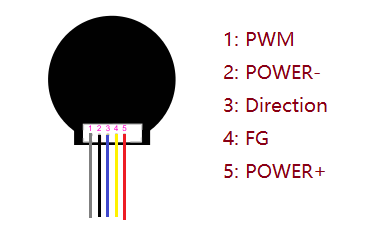
Pinout del motor
| n° | Nombre | Descripción |
|---|---|---|
| 1 | PWM | PWM Control, 0-5V (20~30KHz) |
| 2 | Power – | POWER- (GND) |
| 3 | Direction | Pin direccional:+5V el motor gira en sentido horario; GND, el motor gira en sentido anti-horario. |
| 4 | FG | pin de señales (necesita una resistencia pull-up de 5k) |
| 5 | Power + | POWER+ (12V) |
Especificaciones
- Voltaje de operación: 12V
- Corriente nominal: 0.7A
- Velocidad nominal del motor: 7100-7300rpm
- Torque de bloqueo:2.4kg*cm
- Velocidad de salida: ~159 rpm/min.
- Relación de reducción: 45:1
- Numero de pulsos de cada ciclo: 6*45
- Modos de control:
- Control de velocidad PWM
- Control de dirección
- Realimentación de pulsos de salida
- Modelo: FIT0441
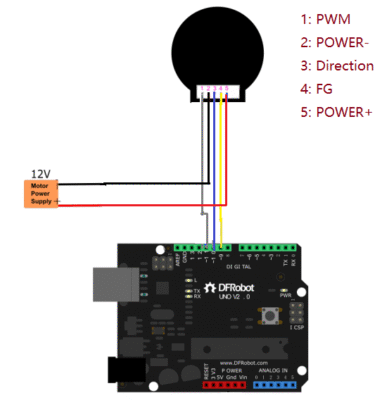
Implementación
Para usar este motor es fundamental conectarlo como se muestra en la imagen. Idealmente, debe conectarse la resistencia Pull-up en el pin 4 del motor, de forma que se asegure su funcionamiento.
Preguntas Frecuentes
¿Cómo sé si este Motor DC Brushless 12V con encoder y controlador es adecuado para mi proyecto de robótica o automatización?
Este motor es ideal si buscas un motor DC brushless de 12V con control de velocidad y posición integrado, eliminando la necesidad de componentes externos como drivers de motor y encoders. Su simplicidad de conexión directa a un Arduino (o microcontrolador similar) lo hace muy accesible para proyectos de robótica, automatización, o cualquier aplicación que requiera control preciso de movimiento. La velocidad de salida de 159 RPM con una relación de reducción de 45:1 lo hace adecuado para tareas que necesitan fuerza moderada y control de velocidad.
¿Qué significa que el motor incluya encoder y controlador, y cómo simplifica esto mi proyecto?
El hecho de que el motor incluya un **encoder y un controlador integrados** significa que toda la electrónica necesaria para su funcionamiento y retroalimentación ya está dentro del motor.
Encoder: Proporciona información sobre la velocidad y posición del eje del motor (mediante el pin FG, que emite pulsos), lo que permite un control de retroalimentación (feedback) para aplicaciones que requieren un control de posición preciso o un seguimiento de velocidad constante.
Controlador: Gestiona la conmutación del motor brushless, eliminando la necesidad de un driver externo.
Esta integración simplifica enormemente el cableado y la programación. Solo necesitas conectar la alimentación (12V), la señal de control PWM (para velocidad), la señal de dirección, y el pin de retroalimentación FG a tu microcontrolador, sin tener que lidiar con la complejidad de un driver de motor externo o un encoder separado.
¿Cómo se conecta este Motor DC Brushless a un Arduino, y qué son los pines PWM, Direction y FG?
La conexión a un Arduino se realiza a través de los siguientes pines:
PWM (Pin 1): Se conecta a un pin de salida PWM (modulación por ancho de pulso) del Arduino para controlar la velocidad del motor. El rango de control es de 0-5V.
Power – (Pin 2): Se conecta a GND (tierra) del Arduino y de la fuente de alimentación.
Direction (Pin 3): Se conecta a un pin digital del Arduino. Al aplicar +5V, el motor gira en sentido horario; al aplicar GND, gira en sentido anti-horario.
FG (Pin 4): Es el pin de retroalimentación de pulso del encoder. Necesita una resistencia pull-up de 5kΩ conectada a +5V para funcionar correctamente. Este pin se conecta a un pin de entrada digital del Arduino para leer la velocidad (contando los pulsos por unidad de tiempo).
Power + (Pin 5): Se conecta a la fuente de alimentación de 12V DC.
Es fundamental realizar estas conexiones correctamente para el funcionamiento óptimo del motor.
¿Cuáles son las especificaciones de velocidad y torque de este motor, y cómo se relacionan con su aplicación?
Las especificaciones clave son:
Voltaje de Operación: 12V.
Corriente Nominal: 0.7A.
Velocidad Nominal del Motor (sin carga): 7100-7300 RPM.
Relación de Reducción: 45:1.
Velocidad de Salida (del eje del motor con reductora): Aproximadamente 159 RPM.
Torque de Bloqueo: 2.4 kg*cm.
La velocidad de salida de 159 RPM es relativamente lenta pero con un torque de 2.4 kg*cm, lo que indica que tiene fuerza para mover cargas moderadas. Esto lo hace adecuado para aplicaciones donde se requiere precisión en el movimiento o una fuerza considerable a baja velocidad, como en robots pequeños, mecanismos de automatización, o sistemas de control de posición.
Los motores **DC Brushless (sin escobillas)** operan mediante conmutación electrónica en lugar de escobillas mecánicas. Esto ofrece varias ventajas significativas sobre los motores DC con escobillas tradicionales:
Mayor Vida Útil: Al no haber escobillas que se desgasten, los motores brushless tienen una vida útil mucho más larga y requieren menos mantenimiento.
Mayor Eficiencia: Suelen ser más eficientes, convirtiendo más energía eléctrica en energía mecánica.
Menor Ruido Eléctrico: Producen menos interferencia electromagnética, lo cual es beneficioso en circuitos sensibles.
Mejor Control: Permiten un control más preciso de la velocidad y el par, especialmente cuando se combinan con un controlador electrónico.
Menor Desgaste Mecánico: No hay fricción por las escobillas, lo que reduce el desgaste y el calor generado por este concepto.
Valoraciones (0)
Sé el primero en valorar “Motor DC Brushless 12V 159 RPM Con Encoder y Controlador Incluidos.”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados

Motores y actuadores


Motores y actuadores

Valoraciones
No hay valoraciones aún.