

Seguidor de Linea Tracker TCRT5000 IR 4 pin con Regulación
$ 2.100 IVA incluido
El TCRT5000 es un sensor óptico infrarrojo diseñado para detectar líneas o superficies reflectantes mediante la reflexión de luz IR. Es ideal para robots seguidores de línea, ofreciendo salidas analógicas y digitales ajustables mediante un potenciómetro. Su rango de detección es de 1 mm a 25 mm, con alta precisión en distancias cortas.
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Hay existencias
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
Información
¿Qué es?
El sensor seguidor de línea TCRT5000 es un dispositivo óptico infrarrojo ampliamente utilizado en proyectos de robótica, especialmente en robots seguidores de línea. Este sensor está diseñado para detectar la presencia y el color de superficies, lo que lo convierte en una herramienta ideal para la navegación autónoma de robots.
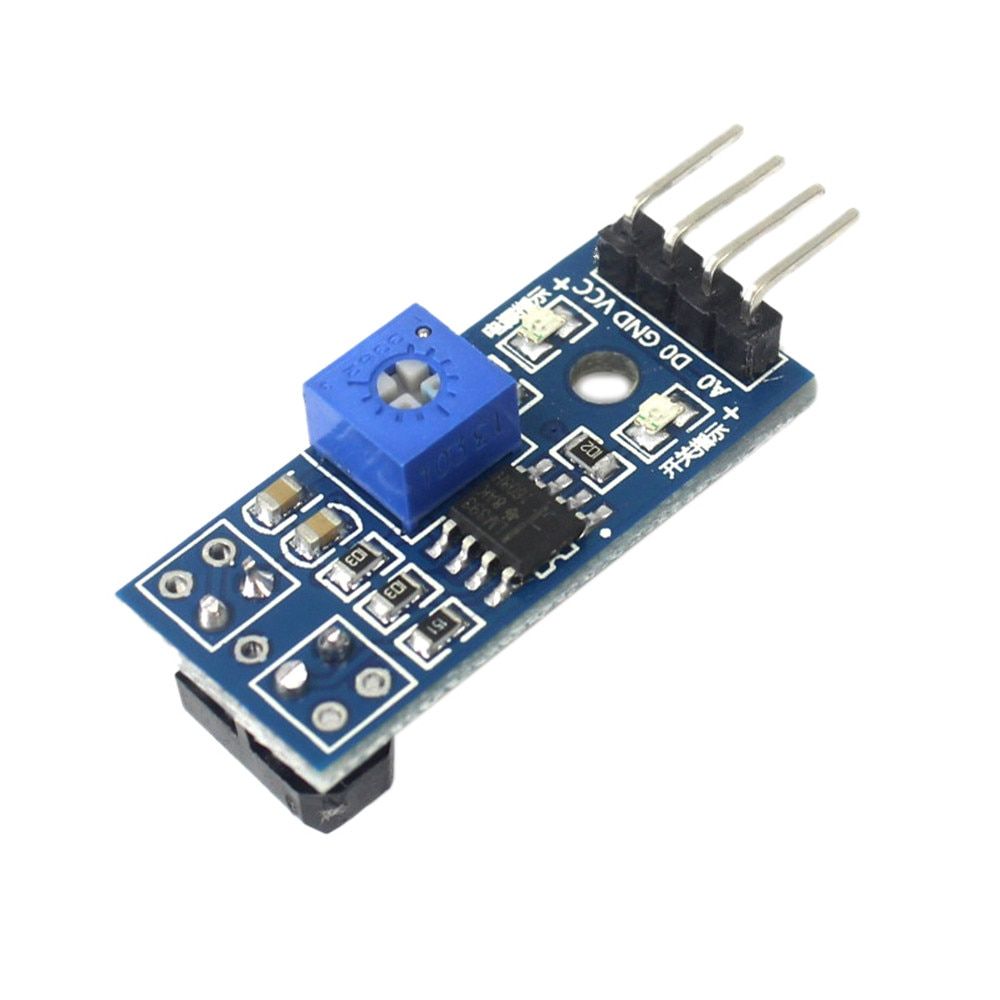
Este es un dispositivo óptico infrarrojo diseñado para detectar líneas o superficies reflectantes, ideal para proyectos de robótica como robots seguidores de línea. Cuenta con un chip LM393, un potenciómetro ajustable para regular la sensibilidad, y soporta un voltaje de operación de 3.5 V a 5 V, con un consumo superior a 15 mA. Su rango de detección varía entre 1 mm y 25 mm, lo que lo hace versátil para diversas aplicaciones. Además, incluye un diseño compacto y fácil de integrar con plataformas como Arduino, siendo una herramienta perfecta para iniciados en robótica y educación tecnológica.

Funcionamiento
El sensor funciona emitiendo luz infrarroja a través de un LED y midiendo la luz reflejada por los objetos cercanos mediante un fototransistor. La cantidad de luz reflejada varía según el color y la reflectividad del objeto, permitiendo al sensor determinar si está sobre una línea o superficie específica.
Especificaciones
| Especificación | Detalle |
|---|---|
| Tipo de Sensor | Infrarrojo Reflectivo |
| Modelo | TCRT5000 |
| Chip | LM393 |
| Voltaje de Operación | 3.3 V a 5 V DC |
| Corriente de Funcionamiento | > 15 mA |
| Rango de Detección | 1 mm a 25 mm |
| Distancia de Detección Óptima | Aproximadamente 2.5 mm |
| Salida | Digital (DO) y Analógica (AO) |
Documentación
Información Adicional
Principios del Funcionamiento del Sensor TCRT5000
El sensor TCRT5000 opera mediante el principio de reflexión de luz infrarroja. Este dispositivo está compuesto por un emisor de luz infrarroja (LED) y un fototransistor que trabajan en conjunto para detectar la presencia de objetos. Cuando el LED emite un haz de luz infrarroja, este se refleja en superficies cercanas, como líneas negras o blancas. El fototransistor capta esta luz reflejada; la cantidad de luz recibida varía dependiendo de la reflectividad del objeto.Cuando el sensor está sobre una superficie clara (como una línea blanca), la luz infrarroja se refleja y es detectada por el fototransistor, generando una señal alta. En contraste, si el sensor se encuentra sobre una superficie oscura (como una línea negra), la luz reflejada es mínima, resultando en una señal baja. Este cambio en la salida permite al sensor determinar si está sobre una línea o no, lo que es fundamental para aplicaciones como robots seguidores de línea. Además, el módulo incluye un potenciómetro que permite ajustar la sensibilidad del sensor, optimizando su rendimiento en diferentes condiciones de iluminación y tipos de superficies.
Enlaces Externos
Información adicional
| Número de modelo: | TCRT5000 |
|---|---|
| Salida: | Transductor de conmutación |
| Material: | Polímero |
| Tipo: | Sensor de Vibraciones |
| Teoría: | Sensor óptico |
| Uso: | Sensor de rayos |
| Se puede personalizar: | Sí |
Valoraciones (0)
Sé el primero en valorar “Seguidor de Linea Tracker TCRT5000 IR 4 pin con Regulación”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho a domicilio normalmente al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados

Movimiento


Valoraciones
No hay valoraciones aún.