

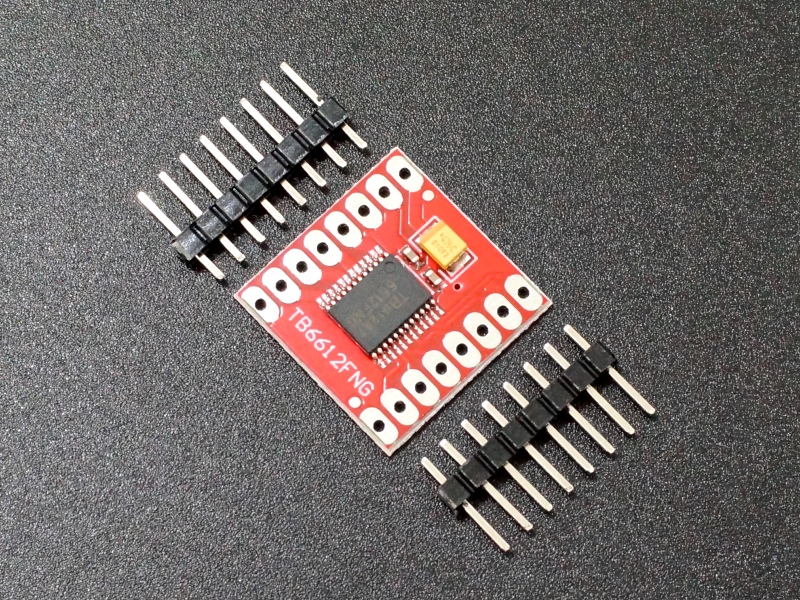
Controlador/Driver Motor TB6612FNG
$ 4.900 IVA incluido
El TB6612FNG es un controlador de motor versátil y potente que permite controlar dos motores de corriente continua (CC) de forma independiente. Ofrece una corriente constante de 1,2 A por motor, con picos de hasta 3,2 A, lo que lo hace ideal para una amplia gama de aplicaciones.
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Sin existencias
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
El TB6612FNG es un controlador de motor diseñado para manejar dos motores de corriente continua de manera independiente. Cada motor puede ser controlado con una corriente constante de 1,2 Amperios, pudiendo llegar hasta 3,2 Amperios durante picos de alta demanda. Esta capacidad de manejo de corriente significa que el controlador puede gestionar eficazmente una gama de motores con diversas necesidades de potencia.
Este controlador se distingue por su flexibilidad en modos de operación. Ofrece cuatro modos seleccionables: rotación en el sentido de las agujas del reloj (CW), rotación en sentido contrario a las agujas del reloj (CCW), frenado en corto y parada. Estos modos se pueden activar y controlar mediante dos señales de entrada, etiquetadas como IN1 e IN2.
Además de la dirección, las velocidades de los motores también pueden ser ajustadas individualmente. Esto se logra a través de una señal de entrada PWM, que puede funcionar con una frecuencia de hasta 100kHz. Este rango de frecuencia amplio proporciona una gran precisión en el control de velocidad.
El TB6612FNG cuenta con un modo de ahorro de energía o modo de espera. Para desactivar este modo, la clavija STBY debe estar conectada a una resistencia pull-up, permitiendo así una mayor eficiencia energética.
En cuanto a la alimentación, este controlador es adaptable a una variedad de sistemas. La tensión lógica (VCC) puede variar entre 2,7 y 5,5 voltios, mientras que la tensión de alimentación del motor (VM) no debe superar los 15 voltios. Esta flexibilidad en la alimentación permite la integración del controlador en diversos circuitos y aplicaciones.
Para proteger tanto al controlador como a los motores, el TB6612FNG viene equipado con un circuito de apagado térmico y detección de bajo voltaje. Esto asegura una operación segura y confiable, protegiendo los componentes de posibles daños o fallos.
Los pines del TB6612FNG son fácilmente accesibles a través de conectores espaciados de 0,1″, con los pines de entrada y salida ubicados en lados opuestos. Esto facilita la conexión y la integración del controlador en cualquier proyecto o sistema.
Características principales:
- Control de dos motores: Maneja dos motores de CC con una corriente constante de 1,2 A por motor (3,2 A en pico).
- Modos de operación: Cuatro modos de funcionamiento seleccionables (CW, CCW, frenado en corto y parada) mediante dos señales de entrada.
- Control de velocidad: Ajuste individual de la velocidad de cada motor mediante señal PWM de hasta 100 kHz.
- Modo de espera: Ahorro de energía con la función de desactivación del modo de espera a través de la clavija STBY.
- Alimentación: Tensión lógica (VCC) de 2,7 a 5,5 V y tensión de alimentación del motor (VM) de hasta 15 V.
- Protección: Circuito de apagado térmico y detección de bajo voltaje integrados.
- Facilidad de uso: pines del TB6612FNG accesibles a través de conectores espaciados de 0,1″ con pines de entrada y salida en lados opuestos.
Preguntas Frecuentes
¿Cuál es la ventaja técnica de usar este driver TB6612FNG en lugar del clásico L298N?
La principal ventaja es la eficiencia energética y el rendimiento. El TB6612FNG utiliza transistores MOSFET como interruptores, que tienen una resistencia interna muy baja. Esto se traduce en:
- Menor Caída de Voltaje: A diferencia del L298N que puede «robar» hasta 2V, el TB6612FNG tiene una caída mínima. Esto significa que tu motor recibe más voltaje de la fuente de alimentación, resultando en mayor torque y velocidad.
- Mayor Eficiencia: Al desperdiciar menos energía en forma de calor, es ideal para proyectos alimentados por batería, ya que prolonga su duración.
- Tamaño Compacto: Es significativamente más pequeño y ligero que el módulo L298N.
En resumen, el TB6612FNG es la evolución moderna y superior del L298N para motores de baja y media potencia.
¿Cómo se controla la dirección y el frenado? ¿Qué diferencia hay entre «freno» y «parada»?
El control se realiza con los pines IN1 e IN2 para cada motor. La diferencia entre freno y parada es clave:
- Parada (Stop / Coast): Se logra poniendo IN1 e IN2 en BAJO (LOW). Esto pone las salidas del motor en alta impedancia, desconectándolo efectivamente. El motor se detendrá por inercia (seguirá girando libremente hasta parar).
- Freno Corto (Short Brake): Se logra poniendo IN1 e IN2 en ALTO (HIGH). Esto cortocircuita los terminales del motor, provocando un frenado dinámico y haciendo que se detenga de forma mucho más abrupta.
- Dirección: Para girar en un sentido se usa la combinación (ALTO, BAJO) y para el sentido contrario (BAJO, ALTO) en los pines IN1 e IN2.
¿Para qué sirve el pin STBY (Standby) y cómo debo conectarlo?
El pin STBY es para el ahorro de energía. Actúa como un interruptor general para todo el chip.
- Para operar los motores: El pin STBY debe estar conectado a un nivel lógico ALTO (ej. al pin de 5V o 3.3V de tu microcontrolador).
- Para ahorrar energía: Conecta el pin STBY a un nivel BAJO (GND). Esto pone el driver en un modo de muy bajo consumo, apagando los motores.
Si no planeas usar la función de ahorro de energía, simplemente conéctalo de forma permanente al pin VCC (lógica) de tu placa para mantener el driver siempre activo.
¿Este driver es compatible con microcontroladores de 3.3V como ESP32 o Raspberry Pi, además de Arduino (5V)?
Sí, es totalmente compatible y una de sus grandes ventajas. El voltaje de alimentación para la lógica (VCC) tiene un rango de 2.7V a 5.5V. Esto significa que puedes alimentarlo y controlarlo directamente desde los pines GPIO de un microcontrolador de 5V como un Arduino UNO, o de uno de 3.3V como un ESP32 o Raspberry Pi, sin necesidad de utilizar un conversor de nivel lógico.
¿Necesito añadir diodos de protección externos (flyback diodes) como con el L298N?
No, no es necesario. El chip TB6612FNG ya incluye internamente los diodos de protección (flyback/clamping diodes) en su estructura de MOSFETs. Esta es otra ventaja significativa sobre el L298N, ya que simplifica el circuito, ahorra espacio en tu placa y te protege contra los picos de voltaje generados por los motores al desconectarse.
¿Puedo controlar un motor paso a paso (stepper) con este driver?
Sí, es posible. Un motor paso a paso bipolar tiene dos bobinas, y este driver tiene dos puentes-H completos. Por lo tanto, puedes usar el canal A para controlar una bobina y el canal B para controlar la otra. Aunque existen drivers especializados para steppers (como el A4988 o DRV8825) que simplifican el control con señales de paso y dirección, el TB6612FNG te da un control total a bajo nivel sobre las bobinas, lo cual puede ser útil para técnicas avanzadas como el «microstepping» por software.
Valoraciones (0)
Sé el primero en valorar “Controlador/Driver Motor TB6612FNG”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados




Valoraciones
No hay valoraciones aún.