Excelente dispositivo
¿Te sirvió esta opinión?




$ 1.690 IVA incluido
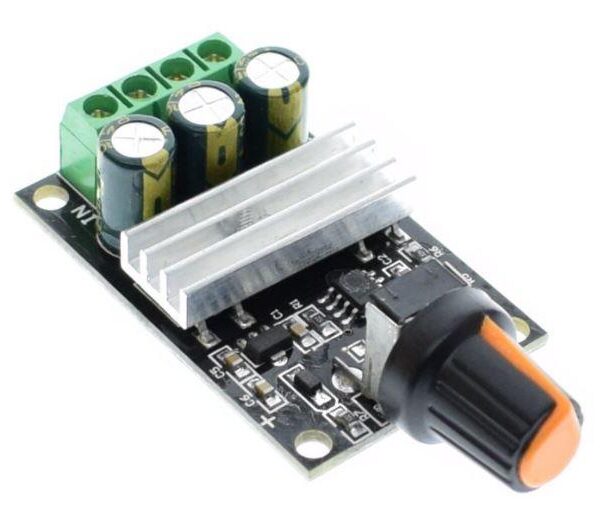
El Módulo Driver Motor DC Mini 298 es un pequeño y poderoso controlador de motores. Cuenta internamente con un puente H, siendo capaz de coordinar los movimientos de dos motores DC a la vez o de un motor paso a paso de 4 cables.
El Driver soporta voltajes entre 2V a 10V, con una corriente máxima de 2.5 A.
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Un Driver para motores DC o puente H, es un circuito formado por diversos transistores (una especie de interruptor electrónico, que permite abrir o cerrar el paso de corriente) dispuestos de tal forma que al energizar los pines de señal, que trabajan a bajo voltaje y corriente, puedan manejar grandes cargas como es la de un motor DC.
Estas señales generalmente provienen de un microcontrolador, por ejemplo, un prototipo de un vehículo a control remoto, necesita un microcontrolador en él, el cual enviará las señales necesarias para mover los motores según se ordene desde el control.
La siguiente imagen es el esquema de un puente H genérico.
Consideremos cada interruptor como uno de los transistores del circuito, la entrada de corriente es por la parte superior y la salida la inferior, el motor se encuentra en el centro.

Si se activa el interruptor 1 y 4 a la vez, ocurre que la corriente circula por el motor de izquierda a derecha. Esto se considera un sentido de giro del motor.

Por el contrario, si se activa solamente los interruptores 2 y 3, la corriente circula por el sentido contrario, pudiendo girar el motor en la dirección contraria.

Recordemos que en el circuito, cada interruptor es un transistor que se abre o cierra el paso de corriente a través de una pequeña señal, por lo que 1 y 4 pueden unirse para un sentido, 3 y4 para el otro. De esta forma, mediante una disposición astuta de componentes, se puede invertir el sentido de giro de un motor DC.
El conexionado del Driver MINI 298 es bastante sencillo para las funciones que puede realizar. En primer lugar, se necesita conectar la fuente de alimentación de los motores (2 – 10V), el cual está destacado con color verde.
Luego, los pines de señal son 5 y están encerrados en color celeste. Los primeros dos pines son para controlar el Motor A. El tercero y cuarto para el Motor B y finalmente el último para el GND del microcontrolador.
No olvides este pin, para el buen funcionamiento es de suma importancia que todo el circuito comparta la misma GND.
El control de señal a través de los pines también es bastante simple. Tomando el caso del Motor A, IN1 e IN2 son sus respectivas entradas se señal y la codificación es la siguiente:
IN1 = HIGH e IN2 = LOW —> Giro de Motor A en un sentido
IN1 = LOW e IN2 = HIGH —> Giro de Motor A en sentido opuesto
Se aplica el mismo principio para el Motor B, siempre dejando un pin en alto y el otro en bajo, intercambiándolos para invertir el sentido de giro del motor.
Para complementar, te adjuntamos un completo video donde se aprecia el funcionamiento, especificaciones, conexionado, programación y un proyecto utilizando el hermano mayor del presente controlador, el Driver L298N.
Aunque el nombre «MINI L298» es un apodo común, este driver no utiliza el antiguo chip L298. En su lugar, se basa en un chip más moderno y eficiente (generalmente el MX1919 o similar) basado en tecnología MOSFET. Las ventajas son significativas: genera mucho menos calor (por eso no necesita un disipador), consume menos energía en reposo, y es compatible de forma nativa con microcontroladores de 3.3V como el ESP32, a diferencia del L298N que a menudo requiere adaptadores de nivel lógico.
Puedes controlar la velocidad de cada motor de forma independiente utilizando una señal PWM (Modulación por Ancho de Pulso) desde tu microcontrolador. En lugar de aplicar un estado HIGH (5V o 3.3V) a los pines IN, debes aplicar una señal PWM a uno de los pines de entrada del canal. Por ejemplo, para el Motor A, mantén IN2 en LOW y aplica una señal `analogWrite()` (en Arduino) al pin IN1. Un valor de 0 detendrá el motor, 128 lo hará girar a media velocidad y 255 a velocidad máxima.
El valor de 2.5A es la corriente de pico (peak current), es decir, la corriente máxima que el driver puede soportar por periodos muy cortos, como durante el arranque del motor. Para un funcionamiento continuo y seguro, se recomienda no exceder los 1.5A por canal. El chip cuenta con protección contra sobrecalentamiento (TSD), pero operar constantemente cerca del límite de pico puede reducir la vida útil del componente. Para motores que consumen más de 1.5A de forma continua, se recomienda un driver de mayor potencia.
Técnicamente es posible, pero no se recomienda. Los motores DC generan mucho ruido eléctrico que puede afectar el funcionamiento de tu microcontrolador, causando reinicios o comportamiento errático. La práctica recomendada es usar dos fuentes de alimentación separadas: una para los motores (ej. un pack de baterías de 4.8V a 9V) conectada a los terminales de alimentación del driver, y otra para el microcontrolador (ej. vía USB o un regulador de voltaje dedicado). Es **crucial** que ambas fuentes compartan una tierra común, conectando el pin GND del driver al pin GND de tu microcontrolador.
Este driver es ideal para controlar un motor paso a paso bipolar de 4 cables. Debes identificar las dos bobinas de tu motor (A y B). Conecta los dos cables de la bobina A a las salidas del «Motor A» en el driver. Luego, conecta los dos cables de la bobina B a las salidas del «Motor B». Para controlarlo, puedes usar librerías estándar como `Stepper.h` de Arduino, definiendo los 4 pines de control del microcontrolador que conectaste a IN1, IN2, IN3 e IN4 del driver.
La ausencia de disipador es una de sus principales ventajas y se debe a su mayor eficiencia. El chip L298N está basado en transistores BJT, que tienen una caída de voltaje significativa y disipan la energía sobrante en forma de calor. Este driver utiliza transistores MOSFET, que tienen una resistencia interna (RDS(on)) mucho más baja, perdiendo muy poca energía en forma de calor. Mientras te mantengas dentro de la corriente de trabajo continuo recomendada (hasta 1.5A), el sobrecalentamiento no será un problema.
Sí, es totalmente compatible y es una de sus mejores características. El rango de voltaje de señal de entrada (1.8V a 7V) asegura que los niveles lógicos de 3.3V de un ESP32, ESP8266 o Raspberry Pi sean suficientes para activar los canales del driver de forma fiable, sin necesidad de usar conversores de nivel lógico. Esto simplifica el cableado y reduce el número de componentes en tu proyecto.
El comprador que dejó una reseña quedó muy satisfecho con el dispositivo, calificándolo como excelente.
Excelente dispositivo
Despacho a domicilio normalmente al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.


Circuitos Integrados (IC)

Calculando...
Te faltan para envío gratis
Opciones de envío
Cada MechaCoin = $1 de descuento real. Crea tu cuenta y empieza a acumular cashback en cada compra.