 Carcasa de acrilico para Arduino Uno
Carcasa de acrilico para Arduino Uno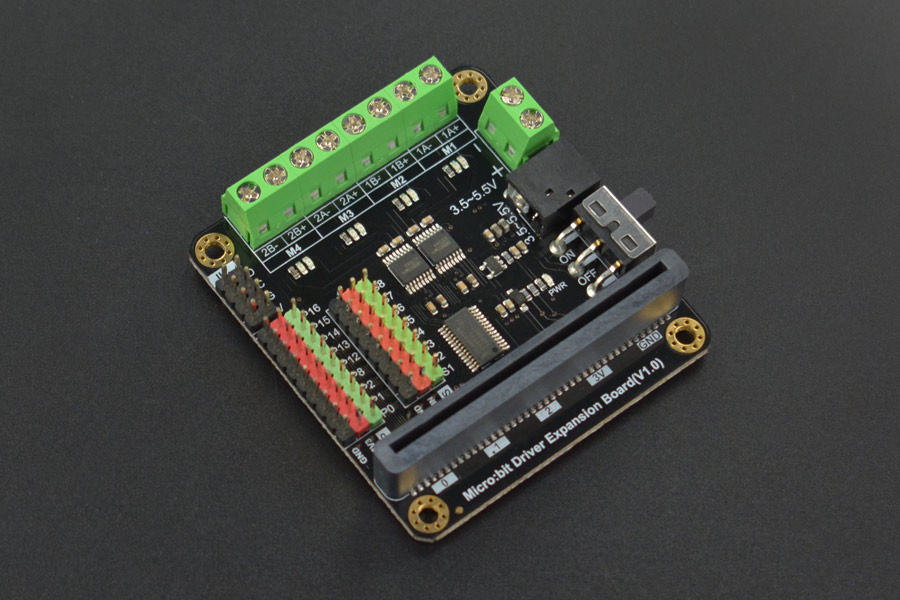
micro:Driver – Placa de Expansión para micro:bit / UNIHIKER – Potencia Tu Creatividad
El precio original era: $ 14.990.$ 13.990El precio actual es: $ 13.990. IVA incluido
El micro:Driver es una placa de expansión imprescindible para los amantes de micro:bit. Con 9 interfaces GPIO y la capacidad de controlar motores y servos, abre un mundo de posibilidades. Su diseño compacto y eficiente utiliza tecnología I2C para un control preciso sin ocupar recursos adicionales. Puedes alimentarlo con una variedad de fuentes, incluso un banco de energía, lo que lo hace versátil y ecológico. Desde proyectos educativos hasta robots inteligentes, el micro:Driver impulsa la creatividad. Además, echa un vistazo a proyectos como el recolector de pelotas de ping pong HuskyLens AI para inspirarte aún más.
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Sin existencias
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
micro:Driver – Placa de Expansión para micro:bit / UNIHIKER – Potencia Tu Creatividad
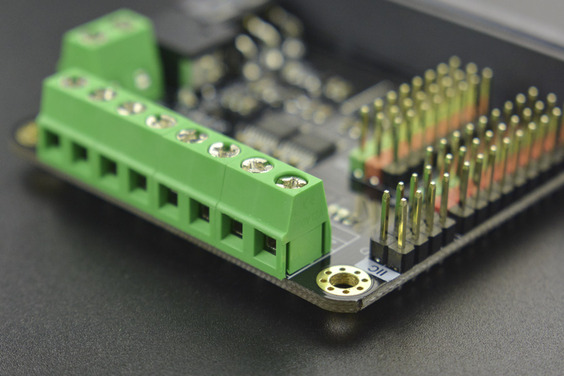
Desde la llegada de micro:bit, su forma sencilla y práctica de programación ha sido ampliamente apreciada por creadores, estudiantes y profesores. Su diseño simple, junto con una gran cantidad de recursos de pines, le brinda posibilidades infinitas. Esta placa de expansión no solo proporciona 9 interfaces GPIO incorporadas para micro:bit, sino que también cuenta con controladores de motor de 4 vías y 8 interfaces de servo, de las cuales los controladores de motor de 4 vías se pueden reutilizar como controladores de motor paso a paso de 2 vías.
La Placa de Expansión micro:bit Driver utiliza un chip de control externo I2C para controlar el motor y el servo motor, ocupando solo dos pines I2C y permitiendo el control dual de motor y servo sin ocupar otros recursos. Utilizando el controlador de motor HR8833, la corriente de funcionamiento continuo máxima es de 1.5A, lo que permite controlar motores pequeños convencionales y motores mini de metal N20. Cada puerto de motor cuenta con un indicador de rotación positiva y negativa para identificar la dirección de giro del motor de manera conveniente, lo que es ideal para estudiantes y creadores que realizan pequeños proyectos. Tanto el GPIO extendido como la interfaz de servo utilizan la interfaz estándar DFRobot-Gravity, lo que permite la compatibilidad con una amplia variedad de módulos y sensores. La interfaz de servo está directamente conectada a la alimentación Vin, lo que aumenta la corriente de suministro y permite que varios servos funcionen al mismo tiempo.
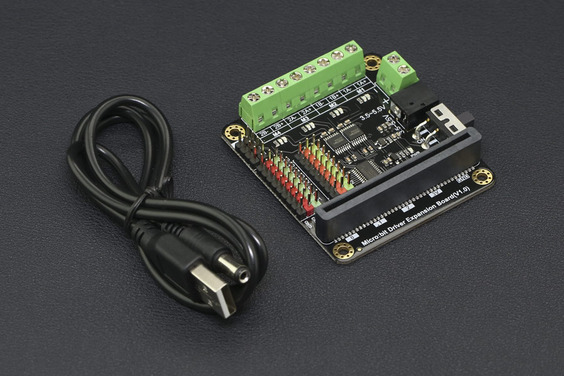
Esta placa de expansión admite una fuente de alimentación de 3.5V a 5.5V. Proporciona un conector DC 2.1 y un terminal de cableado que se puede conectar directamente a tres cajas de baterías secas. Incluye un cable adaptador USB a DC 2.1, que se puede alimentar con un banco de energía y es más económico y respetuoso con el medio ambiente.
Especificaciones
- Voltaje de Salida Digital: 0V / 3.3V
- Voltaje de Salida Analógica: 0~3.3V DC
- Interfaz Estándar Gravity
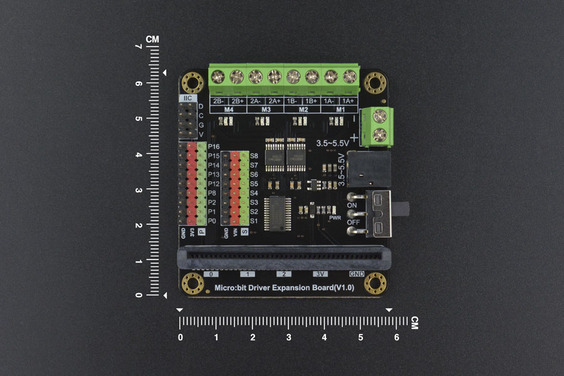
- Interfaz micro:bit: 9 (P0 P1 P2 P8 P12 P13 P14 P15 P16)
- Interfaces de Servo x 8
- Interfaz de Motor: Motor DC x 4 / Motor Paso a Paso x 2
- Dimensiones: 63x58mm / 2.48×2.28 pulgadas
Proyectos
Proyecto 1. Recolector de Pelotas de Ping Pong – HuskyLens AI Robotic Ball Picker
Introducción:
La última vez creé un «recolector de pelotas robótico» controlado por radio y funcionó bien. Esta vez quiero que sea más inteligente. ¡Así que aquí está la idea de hacer un robot autónomo de recogida de pelotas AI! Sin más preámbulos, ¡empecemos!
Preguntas Frecuentes
¿Cómo sé si el micro:Driver es la expansión adecuada para mi proyecto con micro:bit o UNIHIKER?
El micro:Driver es ideal si buscas potenciar las capacidades de tu micro:bit o UNIHIKER, especialmente en proyectos que involucren movimiento. Con 9 interfaces GPIO extendidas, controladores de motor (DC y paso a paso) y 8 interfaces de servo, es perfecto para crear robots, vehículos autónomos, o cualquier proyecto que requiera control preciso de actuadores. Si planeas controlar múltiples motores y servos simultáneamente sin agotar los pines de la micro:bit principal, esta placa de expansión es una solución excelente.
¿Qué capacidades de control de motores y servos ofrece el micro:Driver y cómo se gestionan?
El micro:Driver proporciona:
4 controladores de motor DC: Pueden usarse también como 2 controladores de motor paso a paso. Cada controlador es capaz de manejar hasta 1.5A de corriente continua, permitiendo controlar motores pequeños (como los N20 con caja de engranajes) y motores DC convencionales. Incluye indicadores de dirección de giro.
8 interfaces de servo: Estas interfaces están directamente conectadas a la alimentación Vin (3.5V a 5.5V), lo que asegura suficiente corriente para operar varios servos simultáneamente.
La gestión de todos estos actuadores se realiza a través del chip de control externo I2C, que solo utiliza dos pines (P19/SCL y P20/SDA) de la micro:bit, liberando otros pines GPIO para otras funciones.
¿Cómo se alimenta el micro:Driver y qué opciones de alimentación son compatibles?
El micro:Driver es bastante flexible en cuanto a su alimentación. Soporta un voltaje de entrada de **3.5V a 5.5V**. Puedes alimentarlo de varias maneras:
Conector DC 2.1: Ideal para usar con fuentes de alimentación externas o adaptadores de corriente.
Terminal de cableado: Permite la conexión directa a tres baterías AA o otras fuentes de alimentación de bajo voltaje.
Mediante un banco de energía (Power Bank): Gracias a un cable adaptador USB a DC 2.1 incluido, puedes alimentarlo fácilmente desde un banco de energía, lo que lo hace versátil y ecológico para proyectos portátiles.
¿Qué significa que el micro:Driver utilice tecnología I2C para el control de motores y servos, y cuáles son sus beneficios?
El uso de la comunicación **I2C** para controlar los motores y servos es una gran ventaja. Significa que, a pesar de manejar múltiples actuadores, la placa de expansión solo necesita comunicarse con la micro:bit principal a través de dos pines (SCL y SDA). Esto libera la mayoría de los pines GPIO de la micro:bit para que puedan ser utilizados por otros sensores o módulos, aumentando la versatilidad del proyecto. Además, I2C permite una comunicación digital precisa y un control detallado de la velocidad y posición de los actuadores.
¿Es compatible el micro:Driver con la interfaz estándar DFRobot-Gravity, y qué implicaciones tiene esto?
Sí, tanto los GPIO extendidos como las interfaces de servo utilizan la **interfaz estándar DFRobot-Gravity**. Esto es muy beneficioso porque significa que puedes conectar fácilmente una amplia variedad de sensores y módulos Gravity de DFRobot directamente a la placa micro:Driver, sin necesidad de soldaduras o adaptadores complejos. La estandarización de las conexiones simplifica enormemente el montaje y la expansión de tus proyectos robóticos.
¿Cómo pueden los proyectos como el «Recolector de Pelotas de Ping Pong HuskyLens AI» inspirar el uso del micro:Driver?
Proyectos como el recolector de pelotas de ping pong demuestran el potencial del micro:Driver en la creación de robots complejos y autónomos. En ese ejemplo, el micro:Driver sería crucial para controlar los motores del robot móvil y los servos de la pinza o brazo mecánico que recoge las pelotas, mientras que HuskyLens (la cámara con IA) proporcionaría la «visión» para detectar y localizar las pelotas. Esto ilustra cómo el micro:Driver puede gestionar múltiples actuadores de manera coordinada, permitiendo la construcción de proyectos robóticos más ambiciosos y funcionales.
Valoraciones (0)
Sé el primero en valorar “micro:Driver – Placa de Expansión para micro:bit / UNIHIKER – Potencia Tu Creatividad”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados





Valoraciones
No hay valoraciones aún.