


Shield de motor doble puente H driver para Arduino
$ 7.490 IVA incluido
Shield doble puente H l298, totalmente ideal para trabajar con motores DC, stepper, servo y entre otros.
✅ Boleta y factura
- 🚚 Ver política de despachos debajo de la descripción
Hay existencias
📃 ¿Necesitas una Cotizacion? ¿Comprar para universidades, mercado publico o compra ágil? ¡Contáctanos!.
Descripción
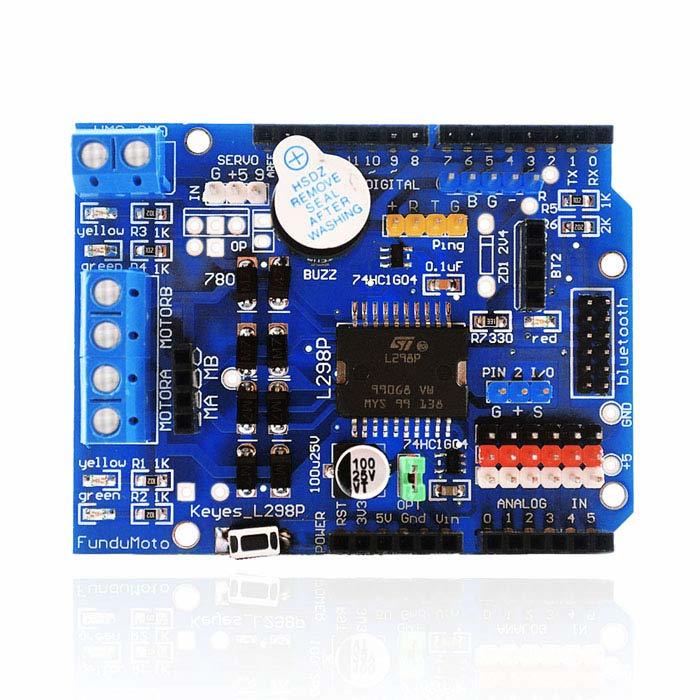
Shield doble puente H l298:
Soporta un consumo de 2a por canal y ademas es capaz de controlar motor en modo Half y Full Bridge. Tiene los header necesarios para conectar
exclusivamente con Arduino UNO R3, Leonardo, Mega2560.
- Modelo L298P
- Voltaje de operacion 7v a 12v
- Maxima corriente de 2A por canal (4a maximo)
- 2 Headers para entradas analogicas
- 2 Headers para salidas analogicas
- 2 Header para comuniccion I2C-TWI
- Pines de control igual a shield motor arduino original
Preguntas Frecuentes
¿Qué es un «puente H» y por qué necesito un shield con esta tecnología para controlar motores?
Un «puente H» es un circuito electrónico que permite invertir la polaridad de la tensión aplicada a una carga, como un motor DC. Esto es lo que posibilita controlar la dirección de giro del motor (adelante/atrás). Además, muchos puentes H modernos permiten controlar la velocidad del motor mediante Modulación por Ancho de Pulso (PWM). Este shield utiliza el chip L298P para implementar dos puentes H independientes, permitiendo controlar dos motores DC o un motor paso a paso de manera simultánea.
¿Qué tipos de motores puedo controlar con este shield y cuáles son sus límites?
Este shield está diseñado para controlar:
- Dos motores DC: De forma independiente, pudiendo controlar su dirección y velocidad (PWM).
- Un motor paso a paso (Stepper): Puede controlar un motor paso a paso bipolar.
- Servomotores: Aunque no es su función principal, los servomotores suelen tener su propio control de señal PWM y alimentación separada, por lo que este shield no es estrictamente necesario para ellos, pero puede ser útil para gestionar la alimentación.
Límites del L298P:
- Voltaje de Operación del Motor: De 7V a 12V DC (esto se refiere al voltaje de la fuente de alimentación externa que conectas al shield para los motores).
- Corriente Máxima: 2A por canal (para cada motor individual). La corriente total máxima para ambos motores operando simultáneamente podría ser menor, y se recomienda no exceder los 4A totales si operan al límite.
¿Cómo se conecta este shield a placas Arduino como UNO R3, Leonardo o Mega2560?
El shield se monta directamente sobre los pines de conexión de estas placas Arduino. Los «headers» (conectores) necesarios para la comunicación y el control ya están soldados en el shield. Simplemente alineas los pines del Arduino con los receptáculos del shield y lo presionas suavemente hasta que haga contacto. Las conexiones de alimentación externa para los motores y los motores mismos se conectan a los terminales de tornillo en el shield.
¿Qué pines de Arduino se utilizan para controlar los motores con este shield?
Los pines de control del shield están diseñados para ser compatibles con los pines PWM y digitales de Arduino. Generalmente, se utilizan pines específicos para:
- Dirección de los motores: Pines digitales para indicar si el motor gira hacia adelante o atrás.
- Velocidad (PWM): Pines PWM (marcados con «~») para controlar la velocidad de cada motor.
- Habilitación de canales: Pines para habilitar o deshabilitar cada canal de motor.
La documentación o tutoriales específicos para el L298P te indicarán qué pines de Arduino se asignan a cada una de estas funciones.
¿El shield L298P tiene alguna protección contra sobrecorriente o sobrecalentamiento?
El chip L298P en sí mismo tiene algunas protecciones térmicas internas que apagan el chip si se sobrecalienta. Sin embargo, no incluye fusibles rearmables o fusibles externos para protección contra sobrecorriente por canal. Es fundamental no exceder los límites de corriente (2A por canal) para evitar dañar el chip o la placa. Para aplicaciones de mayor potencia o donde la protección contra sobrecorriente es crítica, se recomiendan drivers de motor más avanzados como el BTS7960 o el DRV8833.
¿Qué son las entradas y salidas analógicas/I2C-TWI en este shield?
Estas son conexiones adicionales que el shield proporciona:
- Entradas Analógicas: Podrían ser para conectar potenciómetros o sensores que varían su salida analógica, permitiendo un control más fino sobre la velocidad o dirección.
- Salidas Analógicas: Generalmente para indicadores LED o para enviar información de retroalimentación.
- Comunicación I2C-TWI: Algunos shields de motor incluyen la capacidad de comunicarse con otros dispositivos o sensores a través del bus I2C. Esto podría ser para recibir información de encoders o para controlar otros módulos.
La utilidad específica de estos pines dependerá del diseño del shield y de las librerías de software disponibles.
Valoraciones (0)
Sé el primero en valorar “Shield de motor doble puente H driver para Arduino”
Politicas de compra
- La boleta o factura se genera automáticamente en cada compra, utilizando los datos que ingreses al realizar tu pedido.
- Si compra antes de las 13:00 hrs, despachamos su pedido desde origen el mismo día.
- El costo de envío se calcula automáticamente antes de finalizar el pedido, en función de las dimensiones, peso y comuna/ciudad de destino. Trabajamos con Chilexpress y Bluexpress.
- Si al finalizar el pedido selecciona envío gratis, debe considerar que se aplicarán las políticas de transporte correspondientes al servicio contratado.
- El tiempo de entrega se especifica según cada ciudad, comuna y el método de envío seleccionado. Sin perjuicio de que el servicio de envío se pueda retrasar:
Despacho al día hábil siguiente para envíos a: Santiago centro, Huechuraba, Independencia, La Cisterna, La Reina, Las Condes, Macul, Maipú, Ñuñoa, Pedro Aguirre Cerda, Providencia, Pudahuel, Quinta Normal, Recoleta, Renca, Talca, Talcahuano, Vitacura, Conchalí, Estación Central, Concepción, Chillán, Cerro Navia, Cerrillos, Quilicura.
Para otras comunas, el tiempo de entrega se determinará según el servicio de envío (Chilexpress o Bluexpress) hacia: Valparaíso, San Bernardo, Peñalolén, Temuco, Arica, Puerto Montt, La Serena, Coquimbo, Rancagua, Calama, Iquique, Quilpué, Los Ángeles, Punta Arenas, Curicó, Osorno, Castro, Coronel, Ovalle, San Antonio, Buin, Lampa, Melipilla, Los Andes, San Felipe, La Ligua, Rengo, San Vicente de Tagua Tagua, San Fernando, Santa Cruz, Graneros, Lautaro, Loncoche, Villarrica, Lanco, Panguipulli, Río Bueno, Paillaco, Chiguayante, Hualpén, Tocopilla, Quellón, Molina, Curanilahue, Lota, Angol, Penco.
Productos relacionados





Valoraciones
No hay valoraciones aún.