
Introducción
A continuación, en este tutorial, se dará a conocer qué es Tinkercad y para qué sirve en torno a la electrónica, inclinado a una de sus aplicaciones, el armado de circuitos eléctricos (en este caso, un Servomotor controlado mediante Arduino).
¿Qué es Tinkercad, a quién va dirigido y cuáles son sus usos?
Tinkercad es una plataforma en línea que ofrece herramientas para diseñar y simular modelos 3D, crear circuitos electrónicos y programar mediante bloques de código. Está dirigido principalmente a estudiantes, educadores y entusiastas de la tecnología, proporcionando una interfaz amigable para aprender y experimentar con conceptos de diseño 3D, electrónica y programación.
Usos de Tinkercad

Este módulo se utiliza para diseñar y modelar objetos en 3D. Es especialmente útil para proyectos de impresión 3D, prototipado rápido y actividades educativas que involucran diseño tridimensional.

Permite a los usuarios crear y simular circuitos electrónicos sin la necesidad de componentes físicos. Es valioso para la enseñanza de conceptos eléctricos y electrónicos, así como para el diseño y prueba de prototipos de circuitos.

Permite la programación en bloque de un elemento seleccionado a través de la plataforma, el cual es controlado por los códigos en bloque, distinto al código de bloque que se puede seleccionar en la función «Circuits» ya que en esta función se puede realizar la programación de bloques en componentes como Arduino.
Señal PWM de Arduino para el Servomotor
La modulación por ancho o de pulso (en inglés «Pulse Width Modulation» PWM) es un tipo de señal de voltaje utilizada para enviar información o para modificar la cantidad de energía que se envía a una carga.
La Señal PWM Determina la posición del servo motor, y esta posición se determina por el promedio entre el estado alto (5V) y bajo (0V) de la señal PWM. A continuación, se muestran los pines PWM en Arduino Uno.
Estos pueden identificarse con «~» al costado izquierdo:
- Pin 3 (~3)
- Pin 5 (~5)
- Pin 6 (~6)
- Pin 9 (~9)
- Pin 10 (~10)
- Pin 11 (~11)
analogWrite(pin, valor) se utiliza para generar una señal PWM en un pin específico, donde pin es el número del pin PWM y valor es un valor entre 0 y 255 que determina el ciclo de trabajo de la señal PWM.Valor entre 0 y 255, es la representación binaria de 8 bits ya que Arduino UNO utiliza un convertidor analógico a digital (ADC) de 10 bits para proporcionar una resolución de 1024 valores distintos (2^10). Sin embargo, para funciones como
analogWrite, se utilizan solo 8 bits.Al medir voltaje con Multitester en 180° la posición del Servomotor mostró un valor de 0.67V ya que siempre da un valor fijo (Voltaje promedio de la señal PWM).

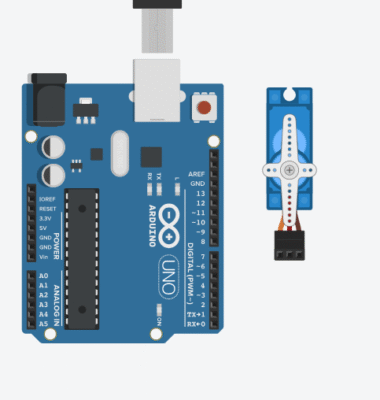
Conexión de Servomotor a Arduino y Paso a Paso del proceso en Tinkercad
– Pin «Power» de Servomotor (Rojo) a 5V de Arduino
– Pin «Ground» de Servomotor (Café) a GND de Arduino
– Pin «Signal» del Servomotor (Naranja) a Pin 9 de Arduino


Circuito Servo motor controlado por Arduino en Tinkercad
Interfaz y visualizaciones de Tinkercad
El video tiene de portada un Servo controlado por un Sensor Ultrasónico, el video solamente muestra el interfaz de Tinkercad, pero puede ver una mejor explicación del circuito mencionado anteriormente en el tutorial ya publicado en nuestra página (Tutorial Servo y Sensor US).
Paso 1
En la zona derecha, en la zona de «components» seleccionar «All» y luego buscar los componentes en la barra marcada (Search)
(Buscar Arduino UNO R3 y Micro Servo (Este debe ser «Positional» o de lo contrario el código en este tutorial no funcionará))


Paso 2
Luego de buscar los componentes, en cualquier orden, colocar los elementos en la zona blanca de la pantalla a la izquierda de la parte de los componentes (puede colocar los componente como le esa más cómodo)
Paso 3
Conectar el Pin «Power» del Servomotor al Pin de 5V de Arduino para la alimentación de este componente

Paso 4
Conectar el Pin «Ground» del Servomotor al Pin GND de Arduino para crear la diferencia de voltaje al momento de alimentar

Paso 5
Conectar el Pin «Signal» del Servomotor al Pin 9 de Arduino para recibir señal PWM y controlar la posición del Servo

Paso 6
En la plataforma presionar el botón «Code» y seleccionar la opción «Text» del lado izquierdo y arriba de las líneas de código, tras estos pasos proceda a escribir el código indicado en la siguiente imágen para comprobar el funcionamiento del circuito
(La biblioteca «<Servo.h>» se encuentra debajo de «Code», el símbolo parecido a un montón de carpetas)
(Para iniciar la simulación de su circuito presione «Start Simulation» del lado derecho del botón «Code»)
Descargar Servo.ino (Arduino IDE)
Paso 7
Si se desea comprobar de manera efectiva el circuito, ya disponiendo de los materiales, realice los pasos del tutorial (de forma no literal si se refiere a lo digital), busque los componentes y siga las conexiones indicadas para realizar el armado físico del circuito presentado

Resultado
En el video a continuación se mostrará el paso a paso realizado para hacer el circuito explicado anteriormente
Conclusión:
Este tutorial destaca la versatilidad de Tinkercad para diseñar y simular circuitos, enfocándose en el control de un servomotor con Arduino. Proporciona información clara sobre la señal PWM y una guía paso a paso en Tinkercad. La combinación de teoría y práctica lo hace accesible para usuarios de todos los niveles, ofreciendo una valiosa introducción a la electrónica.